User program example: zero point return, Example of run operation, Ladder logic program example – Yaskawa MP940 User Manual
Page 474
Motion Control
11.4.4 Zero Point Return (ZRET)
11-72
User Program Example: Zero Point Return
• Example of RUN Operation
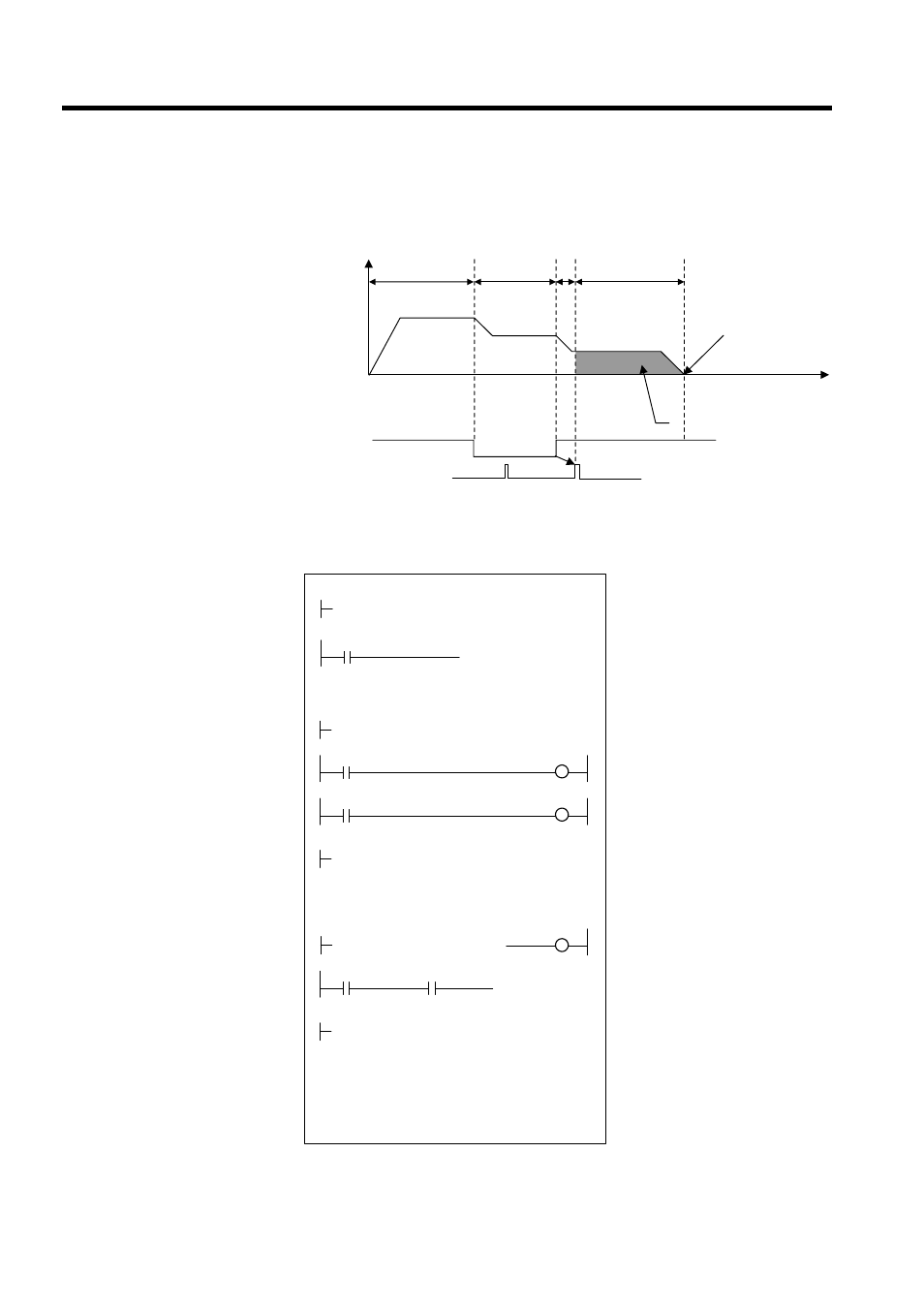
Fig 11.24 Example of a Zero Point Pattern (DEC1 + Phase-C Pulse Signal Method)
• Ladder Logic Program Example
Fig 11.25 Zero Point Return Programming Example (DWG H03)
0
1.
2.
3.
4.
Reverse
Forward
← →
Zero point
Speed
reference
Rapid traverse
speed
Approach
speed
Creep speed
Zero point
return position
Time
Zero point return
final travel distance
Zero point signal
(Phase-C pulse)
Dog (Deceleration
limit switch)
IFON
H0101
RUNMOD
⇒
OWC000
RUN
OBC0010
SB000004
3
MCMDCODE
⇒
OWC020
IEND
RUNPB
IB00304
0000005000
RV
⇒
OLC022
DB000000
LSDEC
OBC001F
IB00310
MCMDRCODE
IWC014 =0003
DB000000
ZRNC
IBC0156
00000
MCMDCODE
⇒
OWC020
IEND
DEND
H0104
RUNMOD
⇒
OWC000
IFON
Set the position control mode to ON.
Rapid traverse speed (RV)
(5,000,000 pulses/min)
Driver operation command (RUN)
IB00310: Limit switch signal
Zero point return (ZRET) is sent as
a motion command.
When IB00304 turns ON, zero point
return starts.
When zero point return is com-
pleted, the zero point return com-
pleted status (IBC0156) turns ON.
When the zero point return com-
pleted status (IBC0156) turns ON,
set NOP (= 0) in the motion com-
mand code.