User program example example of run operation – Yaskawa MP940 User Manual
Page 450
Motion Control
11.3.3 Position Control without Using Motion Commands
11-48
2. Select the Position Control Mode (PCON) (bit 2 of OWC000).
3. Set the Servo ON (RUN) to ON (bit 0 of OWC001).
The axis is positioned according to the specified motion parameters.
Even during positioning, the motion parameter settings can be changed.
4. To stop position control, set the RUN command (RUN) and the position control mode
(PCON) to OFF.
The POSCOMP Positioning Completed Signal (bit D of IWC000) turns ON when the
axis enters the positioning completed range. Control continues even when the axis
enters the positioning completed range (the axis enters servo clamp status).
User Program Example
Example of RUN Operation
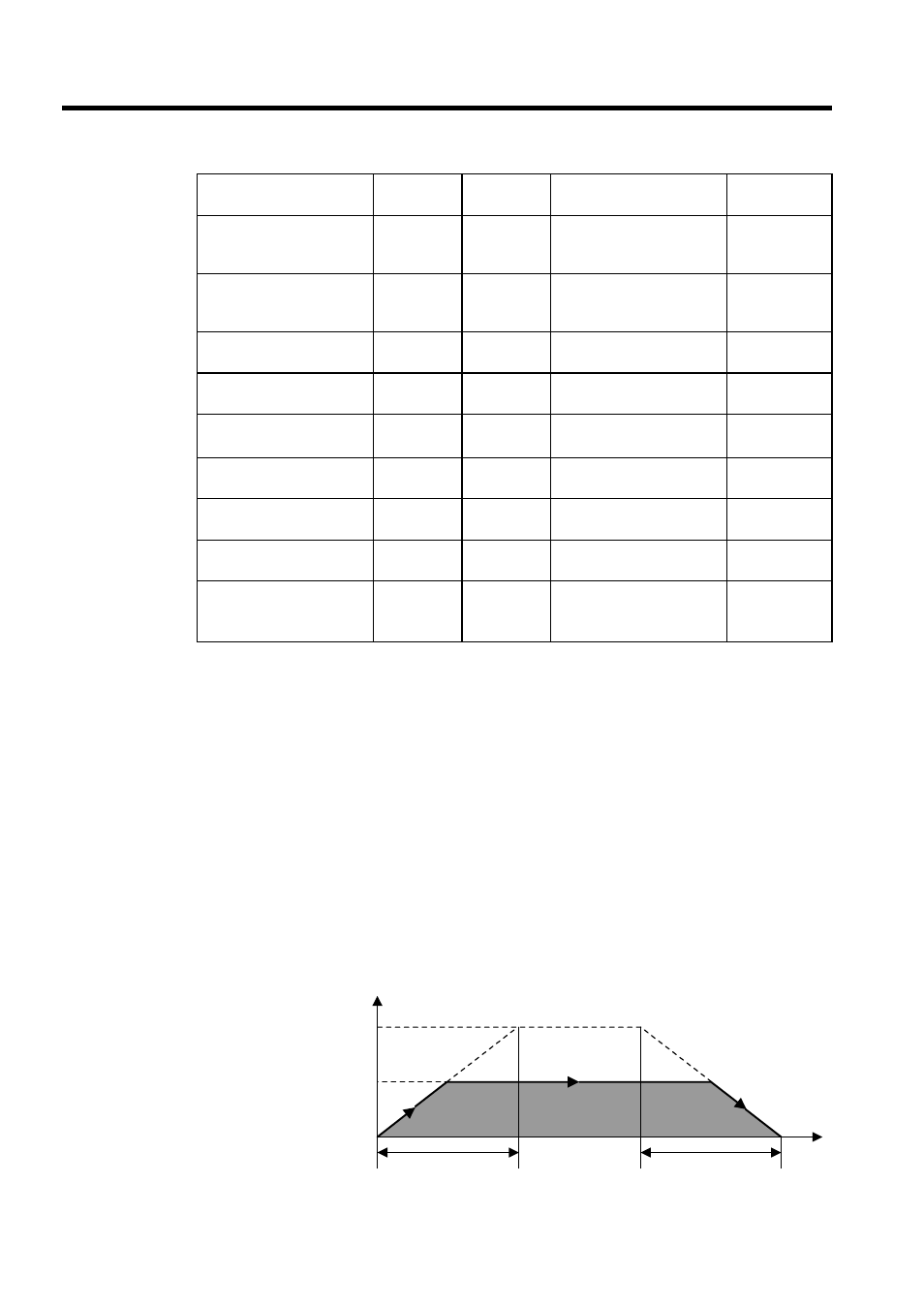
Fig 11.17 Position Pattern
Linear Acceleration Time
Constant (NACC)
OWC00C
0 to 32767
Linear acceleration time con-
stant (ms) at speed pattern
generation
1000
(1 second)
Linear Deceleration Time
Constant (NDEC)
OWC00D
0 to 32767
Linear deceleration time
constant (ms) at speed pat-
tern generation
1000
(1 second)
Positioning Completed
Range Setting (PEXT)
OWC00E
0 to 65535
1 = 1 reference unit
With pulse: 1 = 1 pulse
10 pulses
Error Count Alarm
Detection Setting (EOV)
OWC00F
0 to 32767
1 = 1 reference unit
With pulse: 1 = 1 pulse
65535 pulses
Position Loop Gain Setting
(KP)
OWC010
0.0 to 3276.7 0.1 = 0.1 /s
1 = 1 /s
30.0
(30.0 /s)
Filter Time Constant
(NNUM)
OWC014
0 to 255
For simple S-curved acceler-
ation
0
Feed Forward Gain
Setting (Kf)
OWC011
0 to 200
1 = 1%
0
Position Reference Setting
(XREF)
OLC012
-2
31
to 2
31
-1
1 = 1 reference unit
With pulse: 1 = 1 pulse
10000 pulses
Speed Reference Setting
(NREF)
OWC015
-327.68 to
327.67
Speed reference value
0.01 = 0.01%
1 = 1%
50.00
(50.00%)
Name
Register No.
Setting
Range
Meaning
Setting
Example
NR
(
100%)
NREF
0
NACC
NDEC
Speed
(%)
Steady travel speed
reference
Position reference
Time
(t)