4 zero point return (zret), Ladder logic program example, Overview – Yaskawa MP940 User Manual
Page 463
11.4 Position Control Using Motion Commands
11-61
11
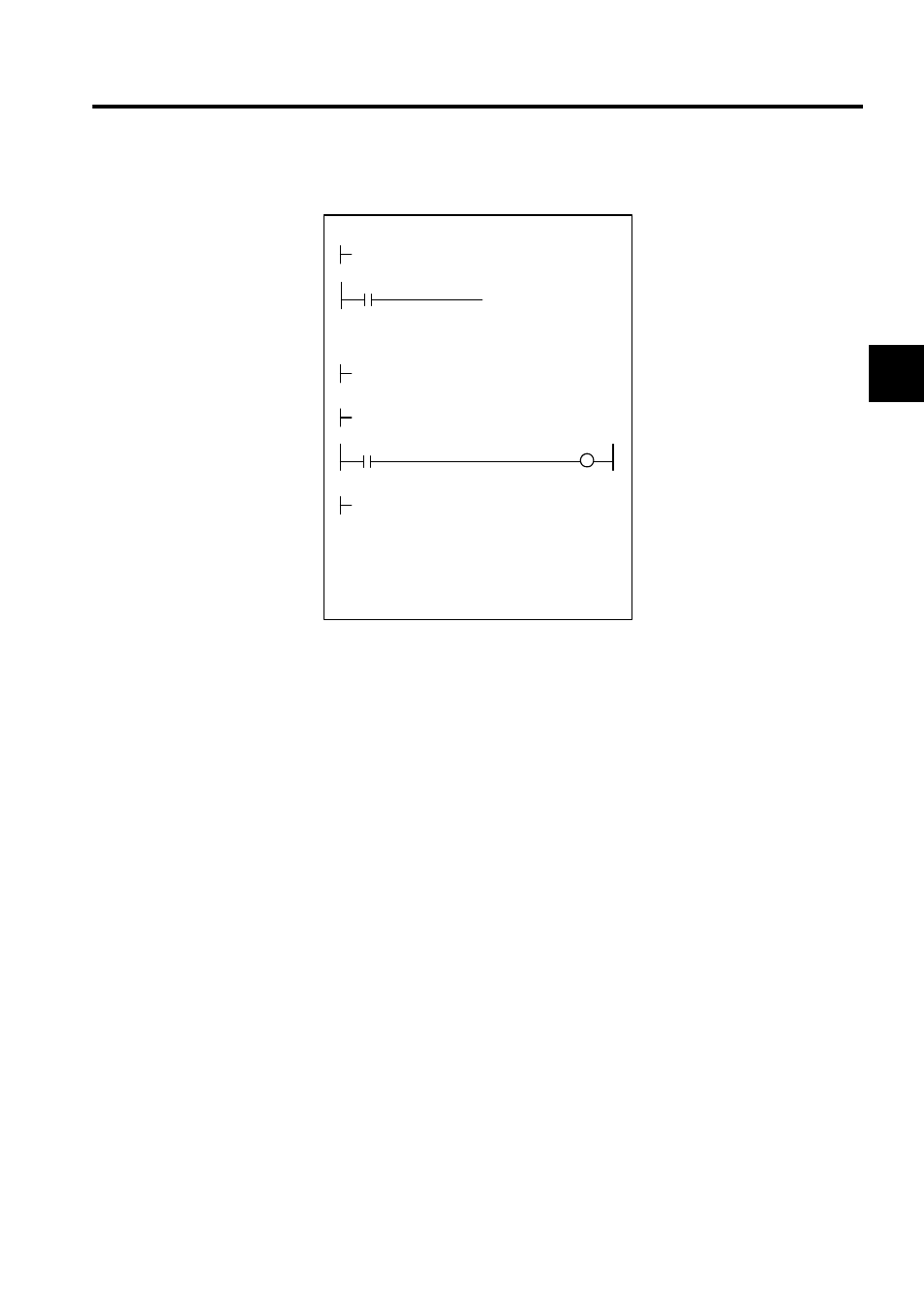
Ladder Logic Program Example
Fig 11.23 External Positioning Programming Example
The example in the above illustration has been greatly simplified. In actual operation, each
register can be controlled from the user program.
11.4.4 Zero Point Return (ZRET)
Overview
The zero point return operation is used to return to the machine coordinate system zero
point.
The machine coordinate system zero point position data is destroyed when the power is
turned OFF. Therefore, after turning ON the power, the machine coordinate system zero
point must be repositioned. In general, a zero point pulse (Phase-C pulse) and a limit switch
showing the zero point area are used to determine the zero point.
There are two zero point return methods. One method uses motion commands, and the other
method uses the zero point return mode. Care is required because zero point return opera-
tions are different with these two methods.
The method of using motion commands is described below.
For the method of using the zero point return mode, refer to the following section,
Zero
Point Return Method
.
IFON
H0104
RUNMOD
⇒
OWC000
0000010000
EXMDIST
⇒
OLC024
RUN
OBC0010
SB000004
2
MCMDCODE
⇒
OWC020
IEND
DEND
RUNPB
IB00304
0001000000
XREF
⇒
OLC012
Set the position control mode to ON.
Position reference pulse (XREF)
(Absolute position: 1000000)
External positioning travel distance
(EXMDIST)
Driver operation command (RUN)
Execute external positioning
(EX_POSING) as the motion command.
When IB00304 turns ON, position con-
trol starts, and the axis moves to abso-
lute position 1000000. When a latch
signal (external positioning signal) is
input while the feed operation is execut-
ing, the axis travels only the external
positioning travel distance (10,000
pulses). When travel is completed, the
IBC000D positioning completed signal
turns ON. If a latch signal has not been
input, the IBC000D positioning com-
pleted signal turns ON when absolute
position 10000 is reached.