Yaskawa MP940 User Manual
Page 502
C-3
C
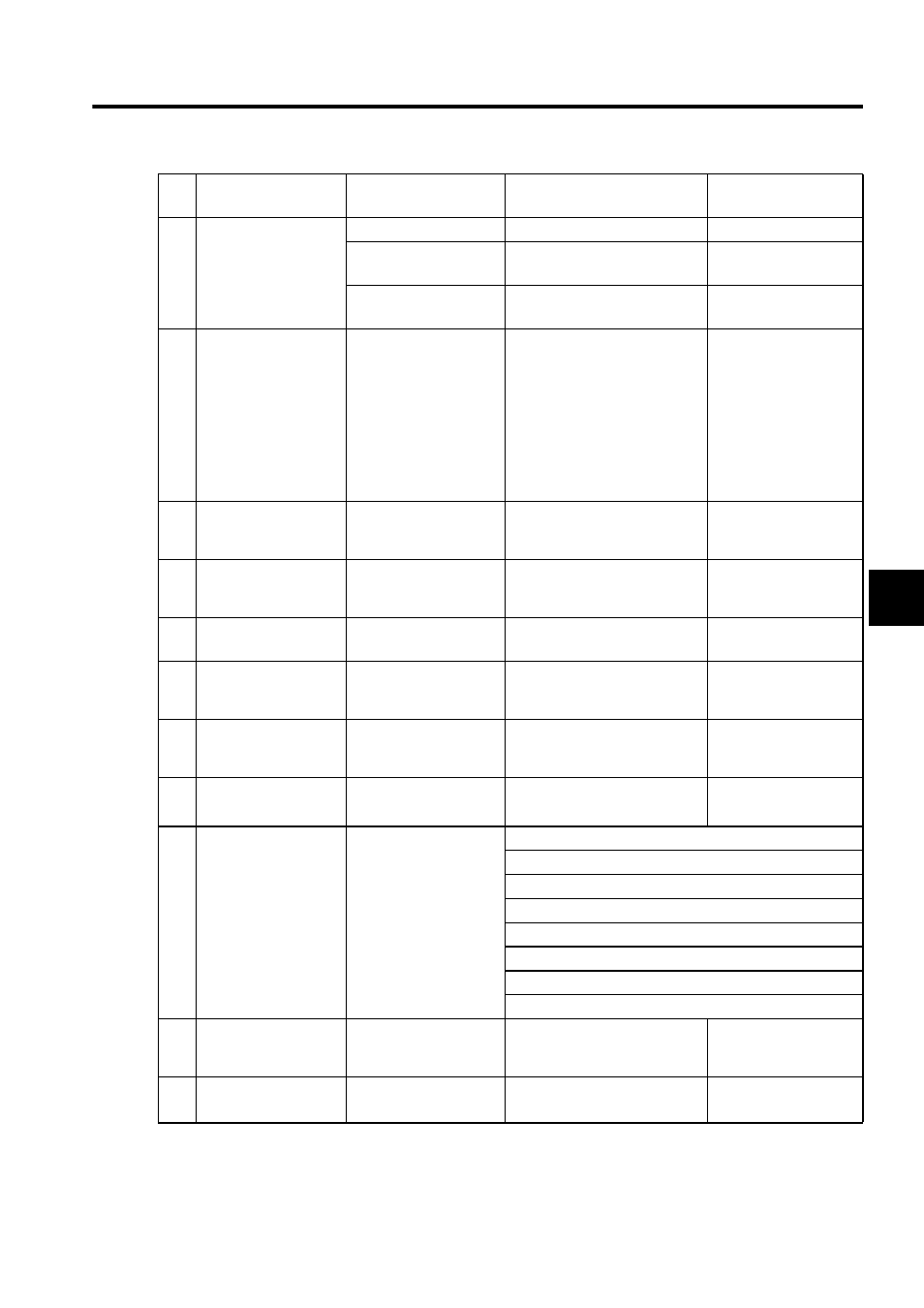
17
Motion Controller
Function Selection
Flags
(SVFUNCSEL)
(Contd.)
Bit 11 to 12: Not used.
-
-
Bit 13: OVT1_SEL
Positive Overtravel Selection
0: Disabled
1: Enabled
Bit 14: OVT2_SEL
Negative Overtravel Selection
0: Disabled
1: Enabled
18
Number of Digits
Below Decimal Point
(DECNUM)
0 to 5
(Default = 3)
Sets the number of digits right of
the decimal point in commands.
(Example) With 3 digits right of
the decimal point
mm: 1 reference unit = 0.001 mm
deg: 1 reference unit = 0.001 deg
inch: 1 reference unit = 0.001
inch
Minimum reference unit
is determined by this
parameter as well as by
the Reference Unit
Selection (see fixed
servo parameter no. 17.).
19
Distance Traveled Per
Machine Rotation
(PITCH)
1 to 2
31
-1
(Default = 10000)
1 = 1 reference unit
21
Servomotor Gear
Ratio
(GEAR_MOTOR)
1 to 65535
(Default = 1)
1 = 1 rotation
22
Machine Gear Ratio
(GEAR_MACHINE)
1 to 65535
(Default = 1)
1 = 1 rotation
23
Infinite Length Axis
Reset Position
(POSMAX)
1 to 2
31
-1
(Default =360000)
1 = 1 reference unit
27
Positive Software
Limit
(SLIMP)
-2
31
to 2
31
-1
(Default =2
31
-1)
1 = 1 reference unit
29
Negative Software
Limit (SLIMN)
-2
31
to 2
31
-1
(Default =2
31
)
1 = 1 reference unit
31
Zero Point Return
Method
(ZRETSEL)
0 to 7
(Default =0)
0: DEC1 + Phase-C pulse
1: ZERO
2: DEC1 + ZERO
3: Phase-C pulse
4: DEC2 + ZERO
5: DEC1 + LMT + ZERO
6: DEC2 + Phase-C pulse
7: DEC1 + LMT + Phase-C pulse
32
Backlash
Compensation
(BKLSH)
0 to 32767
(Default =0)
1 = 1 reference unit
33
Number of Feedbacks
per Motor Rotation
4 to 2147483647
1 = 1 pulse/rev
(Set using
4)
Used in simulation mode
No.
Name
Bit Name
(Setting Range)
Meaning
Remarks
×