Yaskawa MP940 User Manual
Page 254
Parameters
6.3.1 Motion Fixed Parameter Details
6-14
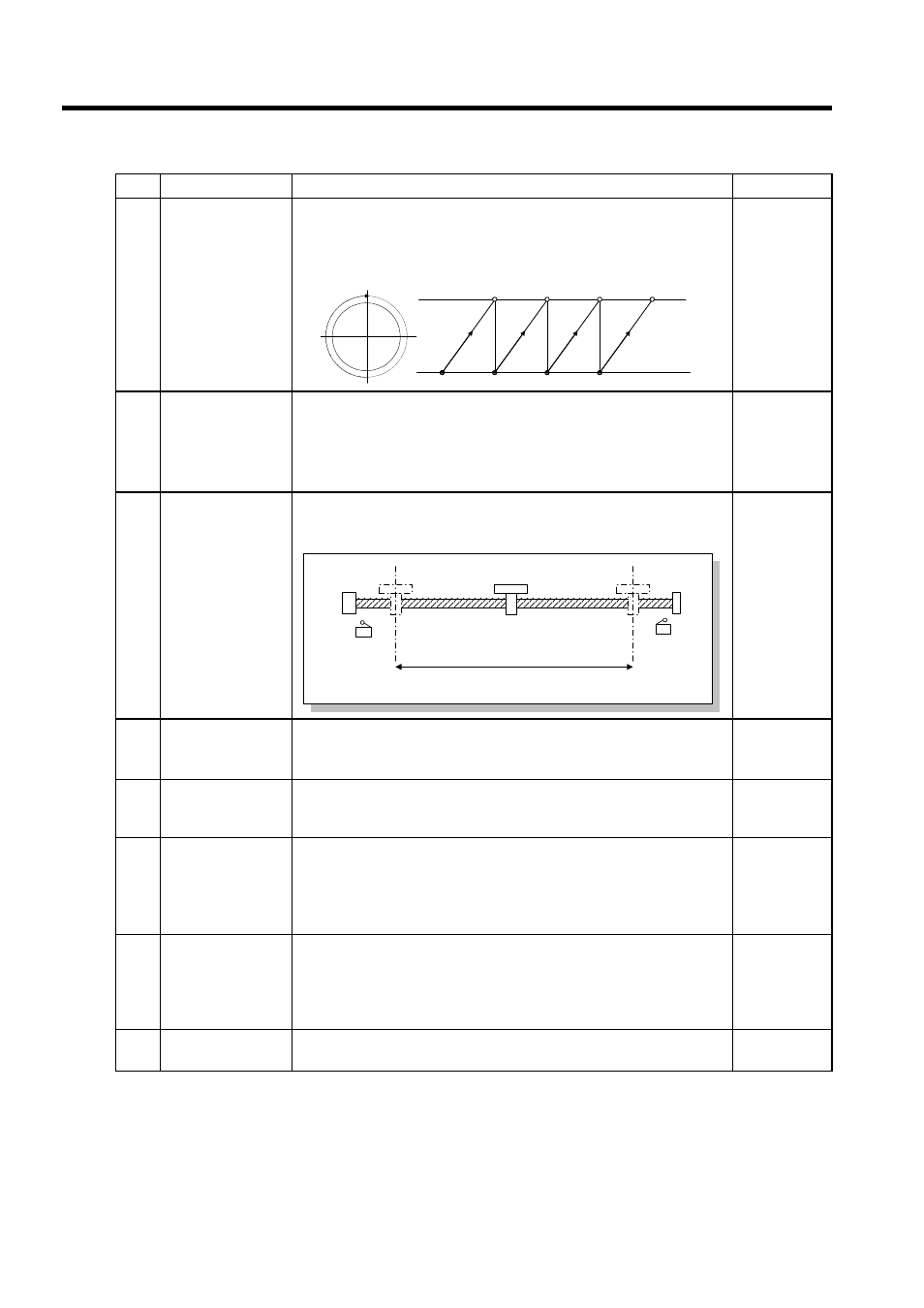
23
Infinite Length Axis
Reset Position
(POSMAX)
Set the reset position for a rotation when infinite length axis is set. This
parameter is not valid when a finite length axis is set.
• Setting range: 1 to 2
31
-1 [reference units]
Example: The rotor will reset every 360 .
360000
27
Positive Software
Limit (SLIMP)
Set the positions at which the software limit function is to operate on the
machine coordinate system.
• Setting range: 1 to 2
31
-1 [reference units]
Whether or not the software limits are used is set in bit 7 and bit 8 of the
Servo Controller Function Selection Flags at fixed parameter No. 17.
2
31
-1
29
Negative Software
Limit (SLIMN)
With the software limits, the upper and lower limits of the range of move-
ment for the machine system are set at fixed parameters and the operating
range is constantly monitored by the controller.
-2
31
31
Zero Point Return
Method
(ZRETSEL)
Set the zero point return method when returning to the zero point
(ZRET) using OWC020: Motion Command Code. Refer to Zero Point
Return Method on the next page for details.
0
(DEC1 +
Phase-C pulse)
32
Backlash
Compensation
Set the backlash compensation in reference units when the Backlash Com-
pensation Selection (bit 6 of the Servo Controller Function Selection Flags at
fixed parameter number 17) is set to enabled.
0
33
Number of
Feedback Pulses
per Motor Rotation
(used in Simulation
Mode)
Use this parameter in simulation mode to set the feedback pulse (without
multiplication) per motor rotation. Set the parameter according to the speci-
fications of the encoder used.
• Setting range: 4 to 2147483647 (P/R)
Always set a multiple of 4.
2048
36
Bias Speed for the
Exponential
Acceleration/
Deceleration Filter
(EXPBIAS)
Set the bias speed for exponential acceleration/deceleration with bias.
0
37 to
48
Not used.
---
No.
Name
Description
Default
°
270°
180°
90°
0°
0
POSMAX
Forward
direction
overtravel
Software limit
(lower limit)
(Range of movement
for the machine)
Reverse
direction
overtravel
Software limit
(upper limit)