Velocity offset, Torque offset, Drive fault actions – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 409: Lt actions
Publication 1784-UM003A-EN-P – June 2003
Motion Object Attributes 401
Velocity Offset
Velocity Offset compensation can be used to correct to provide a dynamic
velocity correction to the output of the position servo loop. Since this value is
updated synchronously every Coarse Update Period, the Velocity Offset can
be tied into custom outer control loop algorithms using Function Block
programming. .
Torque Offset
Torque Offset compensation can be used to provide a dynamic torque
command correction to the output of the velocity servo loop. Since this value
is updated synchronously every Coarse Update Period, the Torque Offset can
be tied into custom outer control loop algorithms using Function Block
programming.
Drive Fault Actions
Each axis can be configured to respond to each of the five types of drive faults
in any one of four different ways. This flexibility is important because motion
control applications differ widely in their fault action requirements.
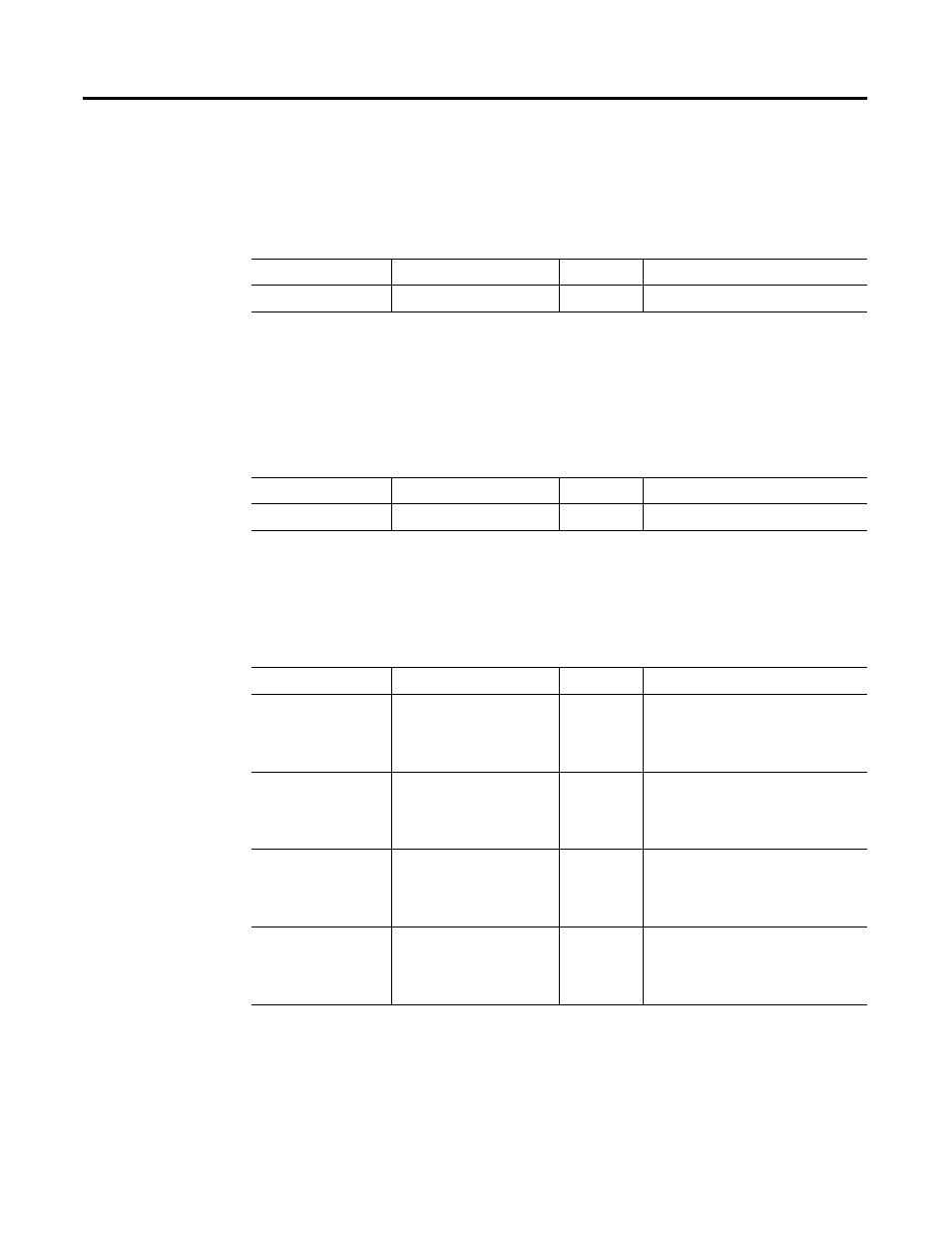
GSV/SSV Access
Attribute Name
Data Type
Values
SSV/GSV
Velocity Offset
REAL
Position Units per sec.
GSV/SSV Access
Attribute Name
Data Type
Values
SSV/GSV
Torque Offset
REAL
% Rated
GSV/SSV Access
Attribute Name
Data Type
Values
SSV/GSV
Soft Overtravel Fault Action SINT
0 = shutdown
1 = disabled drive
2 = stop command
3 = status only
SSV/GSV
Hard Overtravel Fault
Action
SINT
0 = shutdown
1 = disabled drive
2 = stop command
3 = status only
SSV/GSV
Position Error Fault Action
SINT
0 = shutdown
1 = disabled drive
2 = stop command
3 = status only
SSV/GSV
Feedback Loss Fault Action
SINT
0 = shutdown
1 = disabled drive
2 = stop command
3 = status only