Position error tolerance, Position lock tolerance – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 346
Publication 1784-UM003A-EN-P – June 2003
338 Motion Object Attributes
Note: The software travel limits are not enabled until the selected
homing sequence is completed.
Position Error Tolerance
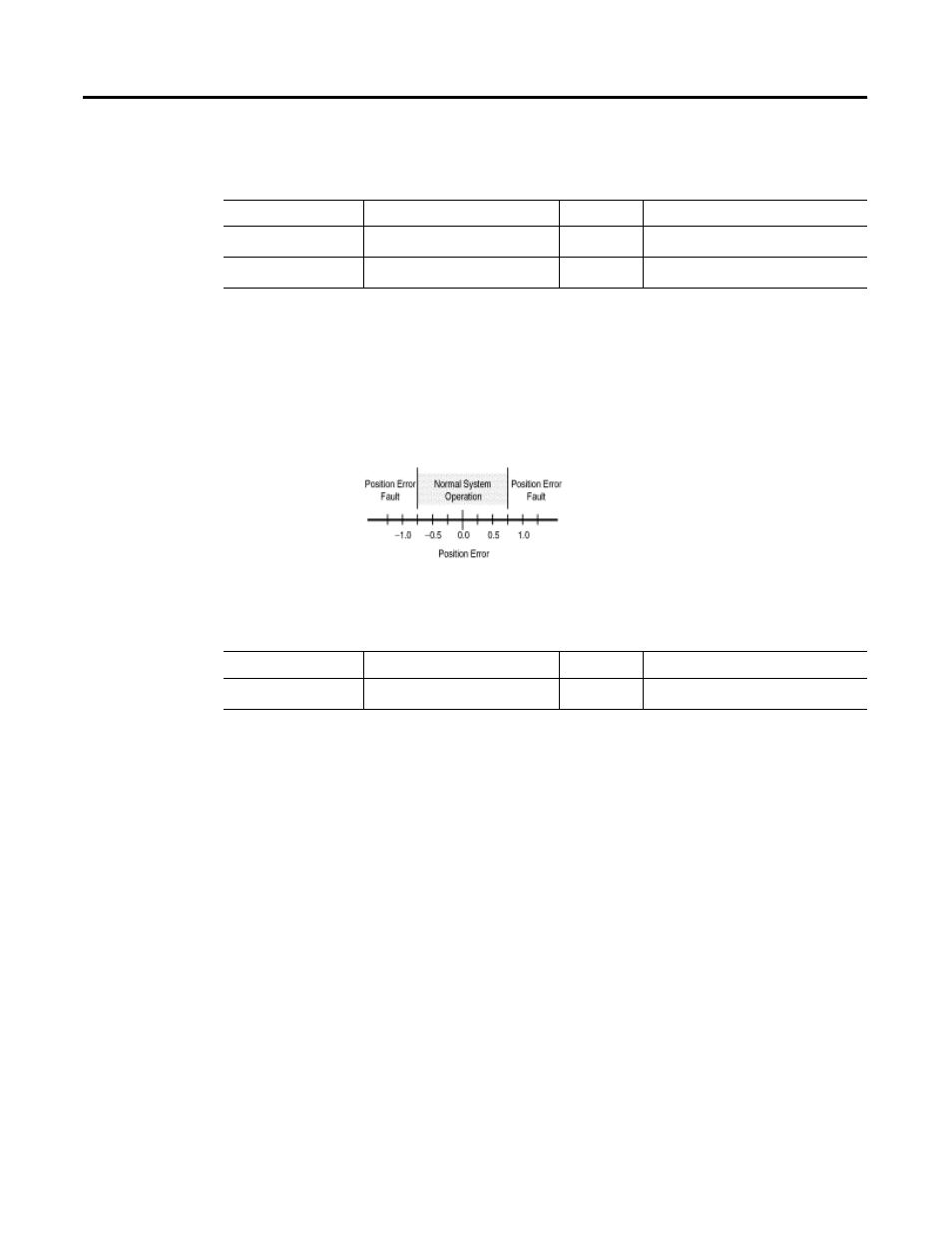
The Position Error Tolerance parameter specifies how much position error the
servo tolerates before issuing a Position Error Fault. Like the position lock
tolerance, the position error tolerance is interpreted as a ± quantity. For
example, specifying a position error tolerance of 0.75 Position Units means
that a Position Error Fault will be generated whenever the position error of the
axis is greater than 0.75 or less than -0.75 Position Units, as shown below:
Figure 13.13 Position Error
The self tuning routine sets the position error tolerance to twice the following
error at maximum speed based on the measured response of the axis. In most
applications, this value provides reasonable protection in case of an axis fault
or stall condition without nuisance faults during normal operation. If you need
to change the calculated position error tolerance value, the recommended
setting is 150% to 200% of the position error while the axis is running at its
maximum speed.
Position Lock Tolerance
The Position Lock Tolerance attribute value specifies how much position error
the servo module tolerates when giving a true Position Locked Status
indication. When used in conjunction with the Position Locked Status bit, it is
a useful parameter to control positioning accuracy. The Position Lock
Tolerance value should be set, in Position Units, to the desired positioning
accuracy of the axis.
GSV/SSV Access
Attribute Name
Data Type
Values
SSV/GSV
Maximum Positive Travel
REAL
Position Units
SSV/GSV
Maximum Negative Travel
REAL
Position Units
GSV/SSV Access
Attribute Name
Data Type
Values
SSV/GSV
Position Error Tolerance
REAL
Position Units