Motion coordinated move instructions – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 264
Publication 1784-UM003A-EN-P – June 2003
256 Motion Instructions
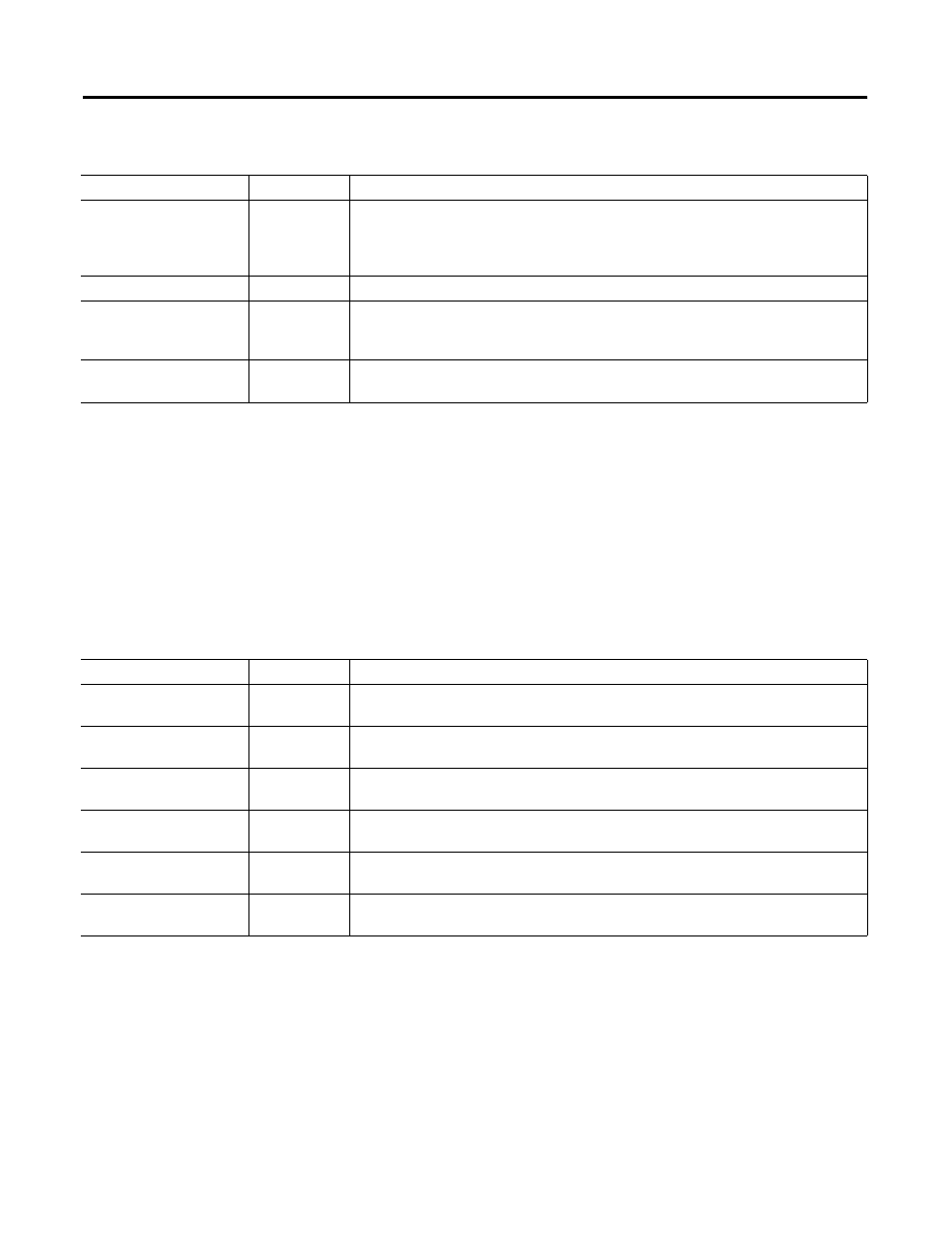
The motion configuration instructions are:
For more information about motion state instructions, refer to the Motion
Configuration Instructions chapter of Logix5000 Controller Motion Instruction Set
Reference Manual, publication 1756-RM007.
Motion Coordinated Move
Instructions
The multi-axis coordinated move motion instructions are the vehicle for
performing linear and circular moves in single and multi-dimensional Cartesian
space.
The motion configuration instructions are:
Instruction
Abbreviation
Description
Motion Apply Axis Tuning
MAAT
Computes a complete set of servo gains and dynamic limits based on a previously
executed MRAT instruction
The MAAT instruction also updates the servo module with the new gain
parameters.
Motion Run Axis Tuning
MRAT
Commands the servo module to run a tuning motion profile for an axis
Motion Apply Hookup
Diagnostic
MAHD
Applies the results of a previously executed MRHD instruction
The MAHD instruction generates a new set of encoder and servo polarities based
on the observed direction of motion during the MRHD instruction.
Motion Run Hookup
Diagnostic
MRHD
Commands the servo module to run one of three diagnostic tests on an axis
Instruction
Abbreviation
Description
Motion Coordinated
Linear Move
MCLM
Initiates a single or multi-dimensional linear coordinated move for the specified axes
within a Cartesian coordinate system.
Motion Coordinated
Circular Move
MCCM
Initiates a two- or three-dimensional circular coordinated move for the specified axes
within a Cartesian coordinate system.
Motion Coordinated
Change Dynamics
MCCD
Initiates a change in path dynamics for coordinate motion active on the specified
coordinate system.
Motion Coordinated Stop
MCS
Initiates a controlled stop of the specified coordinate motion profile taking place on the
designated coordinate system.
Motion Coordinated
Shutdown
MCSD
Initiates a controlled shutdown of all of the axes of the specified coordinate system.
Motion Coordinated
Shutdown Reset
MCSR
Initiates a reset of all of the axes of the specified coordinate system from the shutdown
state to the axis ready state and clear the axis faults.