Torque servo, Drive gains, Figure 13.24 torque servo – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 397
Publication 1784-UM003A-EN-P – June 2003
Motion Object Attributes 389
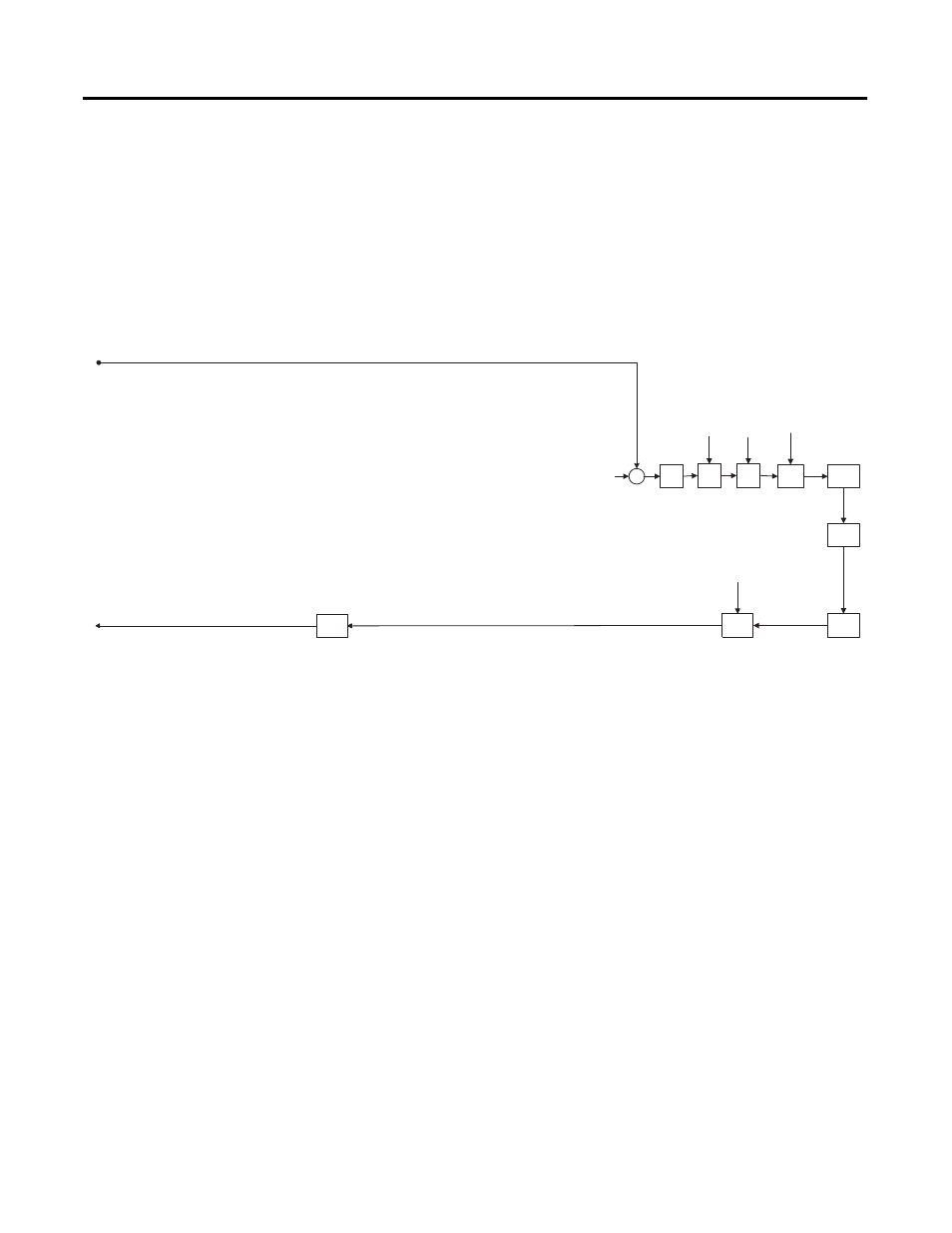
Torque Servo
The Torque Servo configuration provides torque servo control using only the
motor mounted feedback device for commutation. Synchronous input data to
the servo loop includes only the Torque Offset. This values are updated at the
coarse update rate of the associated motion group. The Torque Offset value is
derived from the current value of the corresponding attribute. This offset
attribute may be changed programmatically via SSV instructions or direct Tag
access which, when used in conjunction with future Function Block programs,
provides custom “outer” control loop capability.
Figure 13.24 Torque Servo
Drive Gains
Rockwell Automation servo drives use Nested Digital Servo Control Loop
such as shown in the block diagrams above, consisting typically of a position
loop with proportional, integral and feed-forward gains around a digitally
synthesized inner velocity loop, again with proportional and integral gains for
each axis. These gains provide software control over the servo dynamics, and
allow the servo system to be completely stabilized. Unlike analog servo
controllers, these digitally set gains do not drift. Furthermore, once these gains
are set for a particular system, another SERCOS module programmed with
these gain values will operate identically to the original one.
Hardware
Feedback
Position
Torque
Limit
Position
Feedback
(Coarse)
Notch
Filter
Output
Notch
Filter
BW
Feedback
Polarity
Torque
Offset
Motor
Feedback
Channel
Servo Config = Torque Servo
Σ
Pos/Neg
Torque
Limit
Low
Pass
Filter
Output
Low Pass
Filter
BW
Torque
Command
Motor
Feedback
Motor
Torque
Amplifier
Position
Accum-
ulator
Frict.
Comp
0