Output offset, Manual adjust – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 167
Publication 1784-UM003A-EN-P – June 2003
Naming & Configuring Your Motion Axis 159
Output Offset
Corrects the problem of axis “drift”, by adding a fixed voltage value (not to
exceed ±10 Volts) to the Servo Output value. Input a value to achieve near
zero drive velocity when the uncompensated Servo Output value is zero.
When interfacing an external Servo Drive – especially for velocity servo drives,
it is necessary to compensate for the effect of drive offset. Cumulative offsets
of the servo module’s DAC output and the Servo Drive Input result in a
situation where a zero commanded Servo Output value causes the axis to
“drift”. If the drift is excessive, it can cause problems with the Hookup
Diagnostic and Tuning procedures, as well as result in a steady-state non-zero
position error when the servo loop is closed.
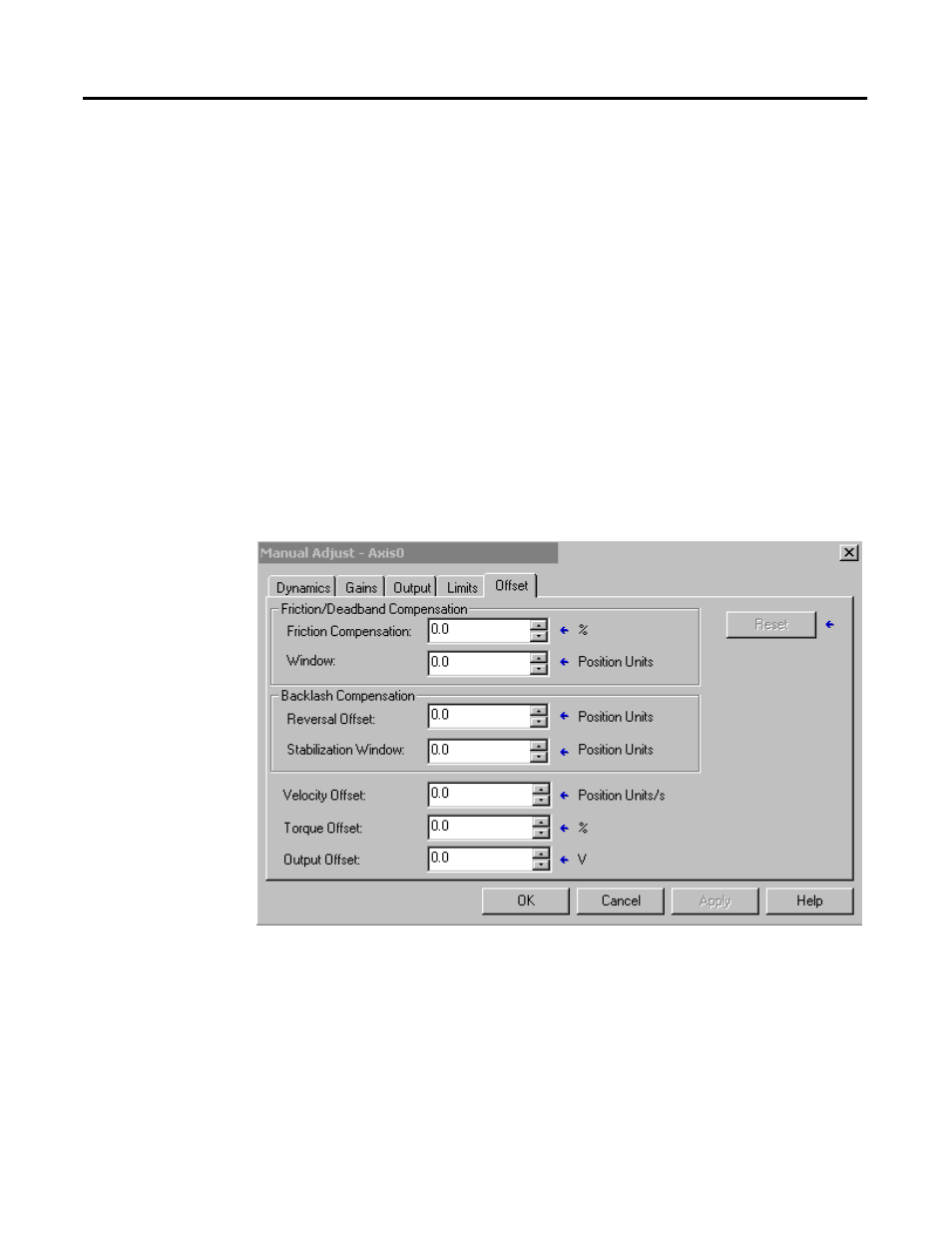
Manual Adjust
Click on this button to open the Offset tab of the Manual Adjust dialog for
online editing of the Friction/Deadband Compensation, Backlash
Compensation, Velocity Offset, Torque Offset, and Output Offset parameters.
Figure 6.41 Axis Properties - Offset Tab Manual Adjust Screen for Axis_Servo
Note: The Manual Adjust button is disabled when RSLogix 5000 is in
Wizard mode, and when offline edits to the above parameters have not
yet been saved or applied.