Dual position servo, Figure 13.20 dual feedback servo, Servo config = dual feedback – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 393
Publication 1784-UM003A-EN-P – June 2003
Motion Object Attributes 385
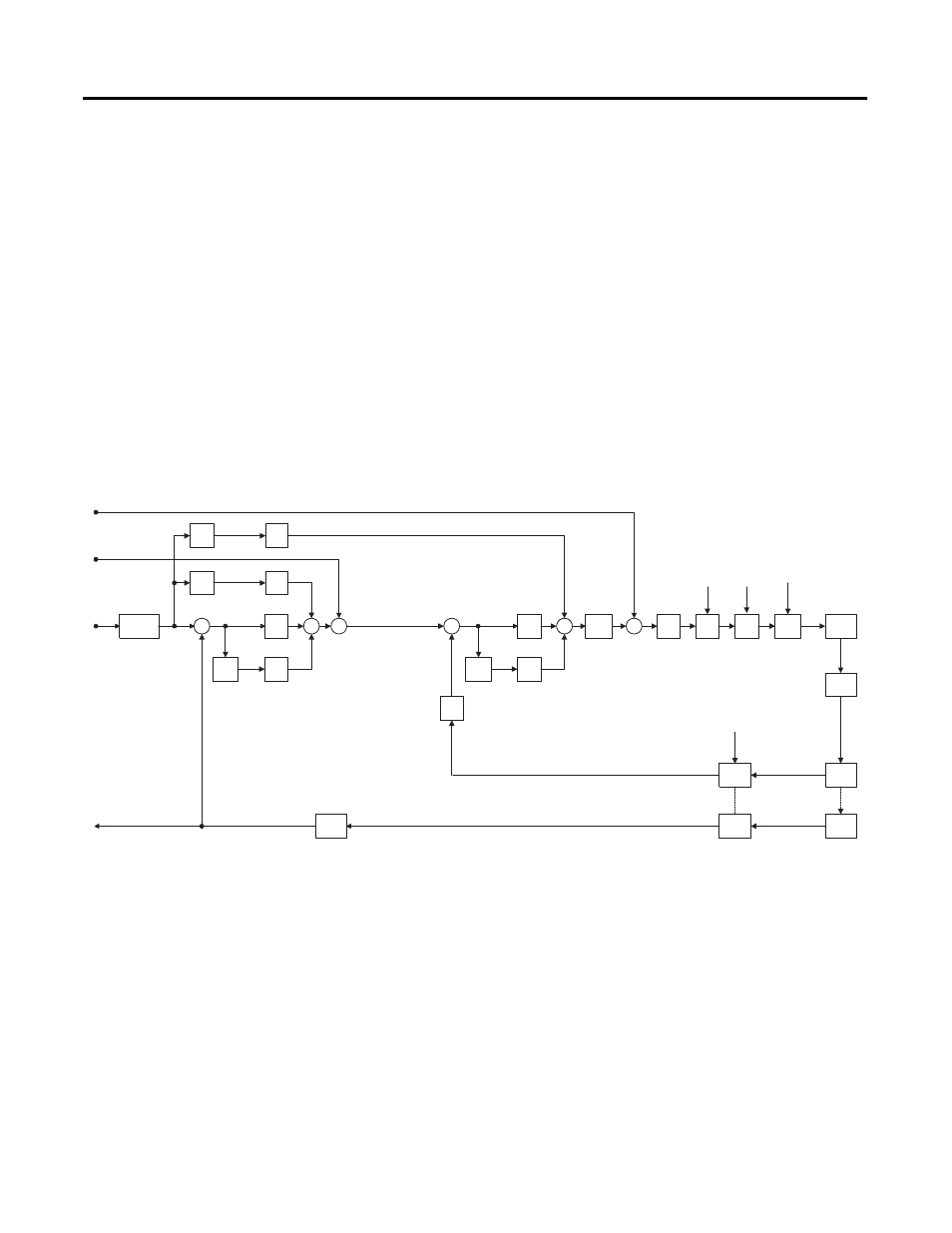
Dual Position Servo
This configuration provides full position servo control using the auxiliary
feedback device for position feedback and the motor mounted feedback
device to provide velocity feedback. This servo configuration combines the
advantages of accurate positioning associated with the auxiliary position servo
with the smoothness and stability of the motor position servo configuration.
Note that the motor mounted feedback device also provides motor position
information necessary for commutation. Synchronous input data to the servo
loop includes Position Command, Velocity Offset, and Torque Offset. These
values are updated at the coarse update rate of the associated motion group.
The Position Command value is derived directly from the output of the
motion planner, while the Velocity Offset and Torque Offset values are
derived from the current value of the corresponding attributes. These offset
attributes may be changed programmatically via SSV instructions or direct Tag
access which, when used in conjunction with future Function Block programs,
provides custom “outer” control loop capability.
Figure 13.20 Dual Feedback Servo
Pos P
Gain
Pos I
Gain
Vel
FF
Gain
d/dt
Error
Accum
-ulator
Position
Error
Low
Pass
Filter
Vel P
Gain
Σ
Σ
Σ
Position
Command
(Coarse)
Fine
Interpolator
Position
Command
Velocity
Command
Velocity
Error
Velocity
Feedback
Hardware
Feedback
Position
Position
Integrator
Error
Acc
FF
Gain
d
2
/dt
Σ
Vel I
Gain
Velocity
Integrator
Error
Torque
Limit
Position
Feedback
(Coarse)
Position
Feedback
Error
Accum
-ulator
Notch
Filter
Output
Notch
Filter
BW
Feedback
Polarity
Velocity
Offset
Torque
Offset
Motor
Feedback
Channel
Servo Config = Dual Feedback
Σ
Torque
Scaling
Σ
Pos/Neg
Torque
Limit
Low
Pass
Filter
Output
Low Pass
Filter
BW
Torque
Command
Motor
Feedback
Aux
Feedback
Motor
Torque
Amplifier
Hardware
Feedback
Position
Aux
Feedback
Channel
Position
Accum-
ulator
Accel
Command
Frict.
Comp