Servo gains, Figure 13.12 servo gains, Servo config = position servo – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 336
Publication 1784-UM003A-EN-P – June 2003
328 Motion Object Attributes
Servo Gains
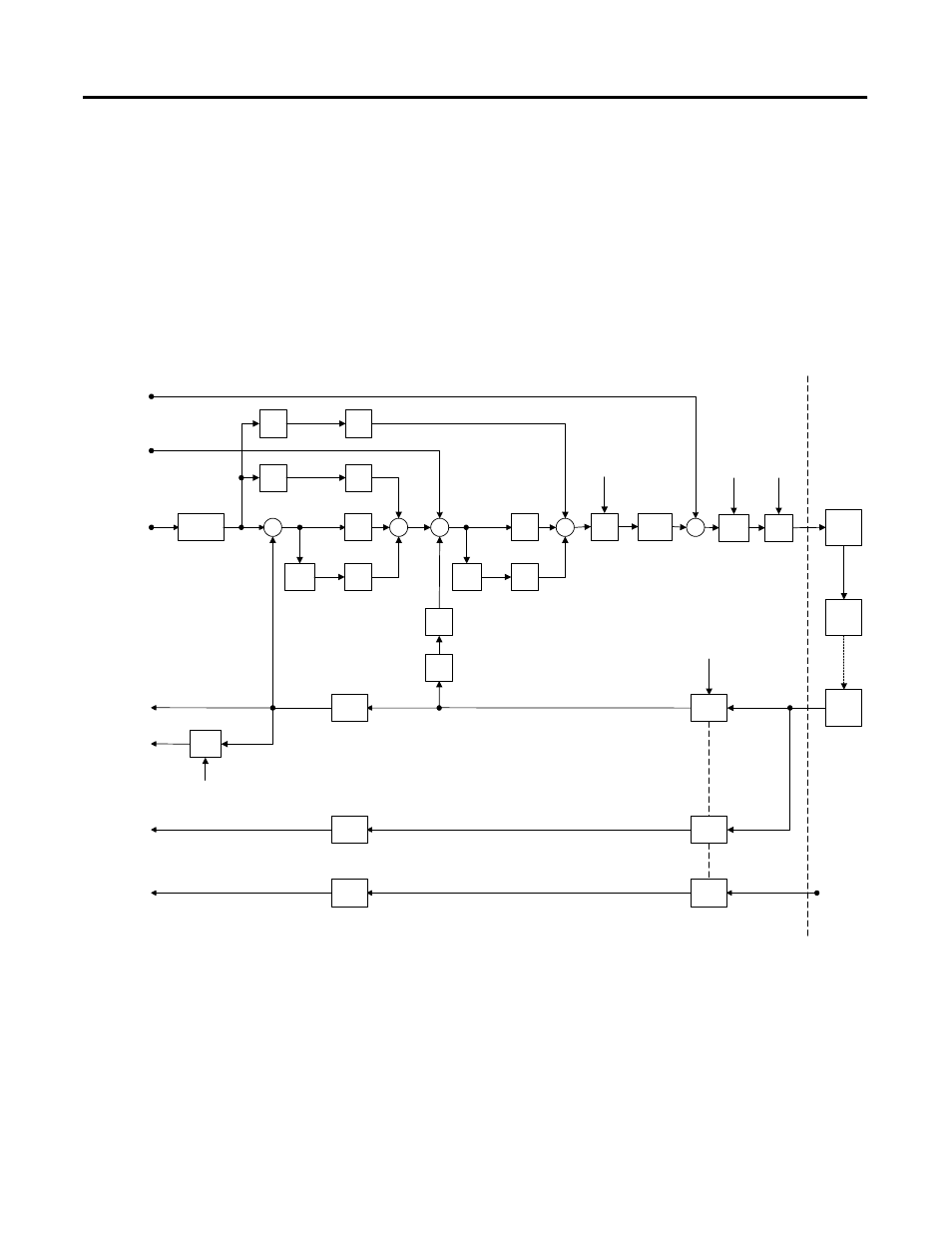
The 1784-PM02AE 2-Axis Servo module uses a Nested Digital Servo Control
Loop consisting of a position loop with proportional, integral and
feed-forward gains around an optional digitally synthesized inner velocity loop,
again with proportional and integral gains for each axis. These gains provide
software control over the servo dynamics, and allow the servo system to be
completely stabilized. Unlike analog servo controllers, these digitally set gains
do not drift. Furthermore, once these gains are set for a particular system,
another servo module programmed with these gain values will operate
identically to the original one.
Figure 13.12 Servo Gains
Pos P
Gain
Pos I
Gain
Vel
FF
Gain
d/dt
Error
Accum
-ulator
Position
Error
d/dt
Low
Pass
Filter
Vel P
Gain
Output
Limit
Position
Accum-
ulator
Σ
Σ
Σ
Position
Command
(Coarse)
Fine
Interpolator
Position
Command
Velocity
Command
Velocity
Error
Velocity
Feedback
16-bit
Encoder
Counter
Position
Integrator
Error
Marker
Latch
Torque
Servo
Drive
Ch Z
Marker
Input
Marker
Event
Handler
Regist.
Event
Handler
Watch
Event
Handler
Watch
Event
Registration
Event
Homing
Event
Regist.
Latch
Registration
Input
Acc
FF
Gain
d
2
/dt
Σ
Vel I
Gain
Velocity
Integrator
Error
16 Bit
DAC
Position
Feedback
(Coarse)
Position
Feedback
Error
Accum
-ulator
Low
Pass
Filter
Output
Scaling
Friction
Comp.
Output
Offset
&
Servo
Polarity
Servo
Output
Level
Output
Filter
BW
Encoder
Polarity
Velocity
Offset
Watch
Position
Torque
Offset
Σ
AQB
Encoder
Ch A/B
Encoder
Input
Motor
Servo Config = Position Servo