Advanced polarity attributes – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 387
Publication 1784-UM003A-EN-P – June 2003
Motion Object Attributes 379
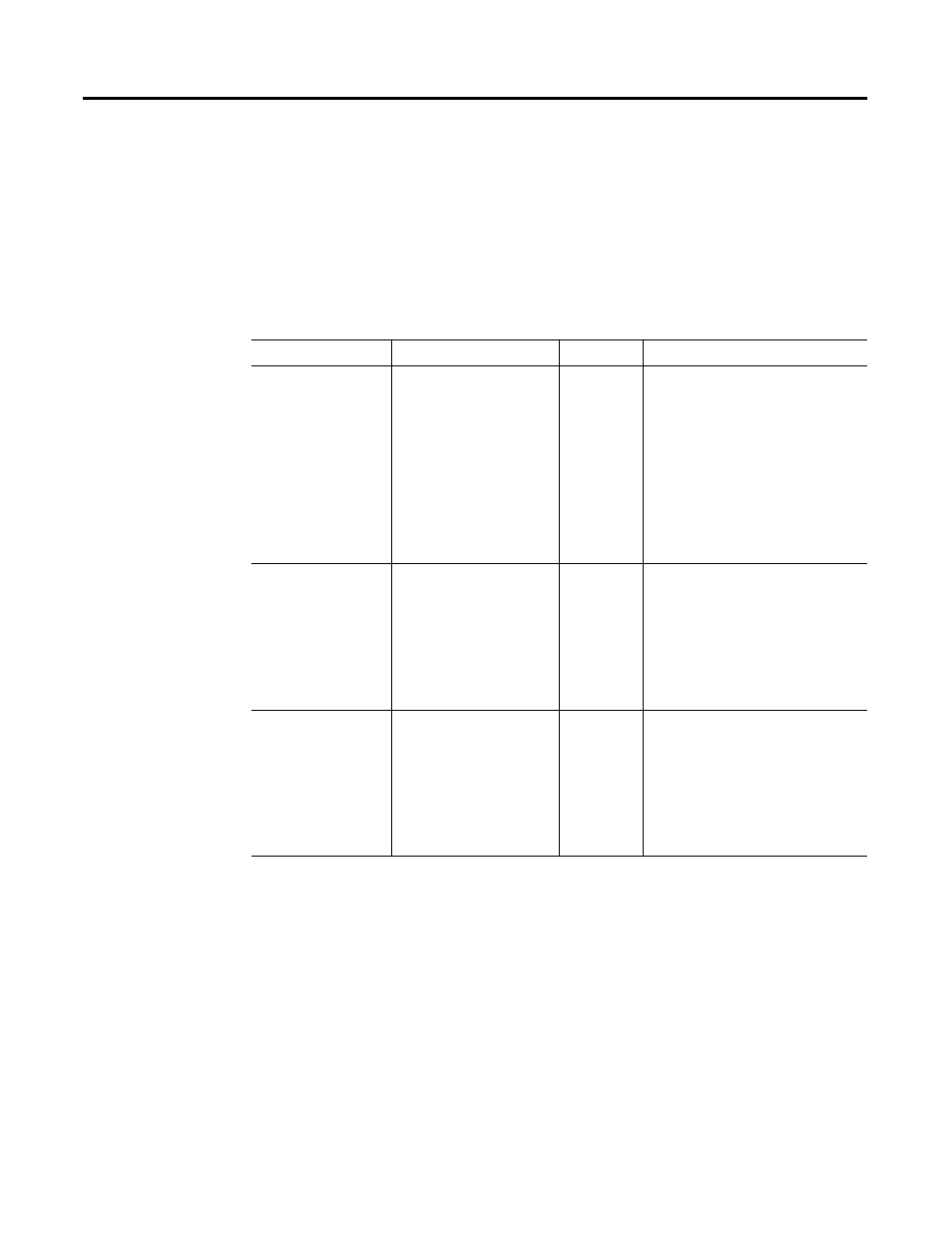
Advanced Polarity Attributes
The Advanced Polarity Attributes are derived from the Drive Polarity Bits
attribute and map directly to SERCOS IDNs. Thus, for a detailed description
of these attributes refer to the corresponding IDN descriptions found in the
SERCOS Interface standard. Since these attributes are automatically
configured to appropriate values based on the current Drive Polarity Bits
settings, the user need not be concerned with manually configuring each of
these attributes. Generally, all command bits are set according to the current
Command Polarity bit value, and the feedback bits are set according to the
current Feedback Polarity bit setting.
GSV/SSV Access
Attribute Name
Data Type
Values
GSV
Position Polarity
INT
Position Polarity
Bit Map:
0: pos cmd
1: additive pos cmd
2: pos feedback 1
3: pos feedback 2
4: use position limits
5: use under/over-flow
Polarity bits:
bit = 0 – non-inverted
bit = 1 – inverted
GSV
Velocity Polarity
INT
Velocity Polarity
Bit Map:
0: vel cmd
1: additive vel cmd
2: vel feedback
Polarity bits:
bit = 0 – non-inverted
bit = 1 – inverted
GSV
Torque Polarity
INT
Torque Polarity
Bit Map:
0: torque cmd
1: additive torque cmd
2: torque feedback
Polarity bits:
bit = 0 – non-inverted
bit = 1 – inverted