Output limit – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 347
Publication 1784-UM003A-EN-P – June 2003
Motion Object Attributes 339
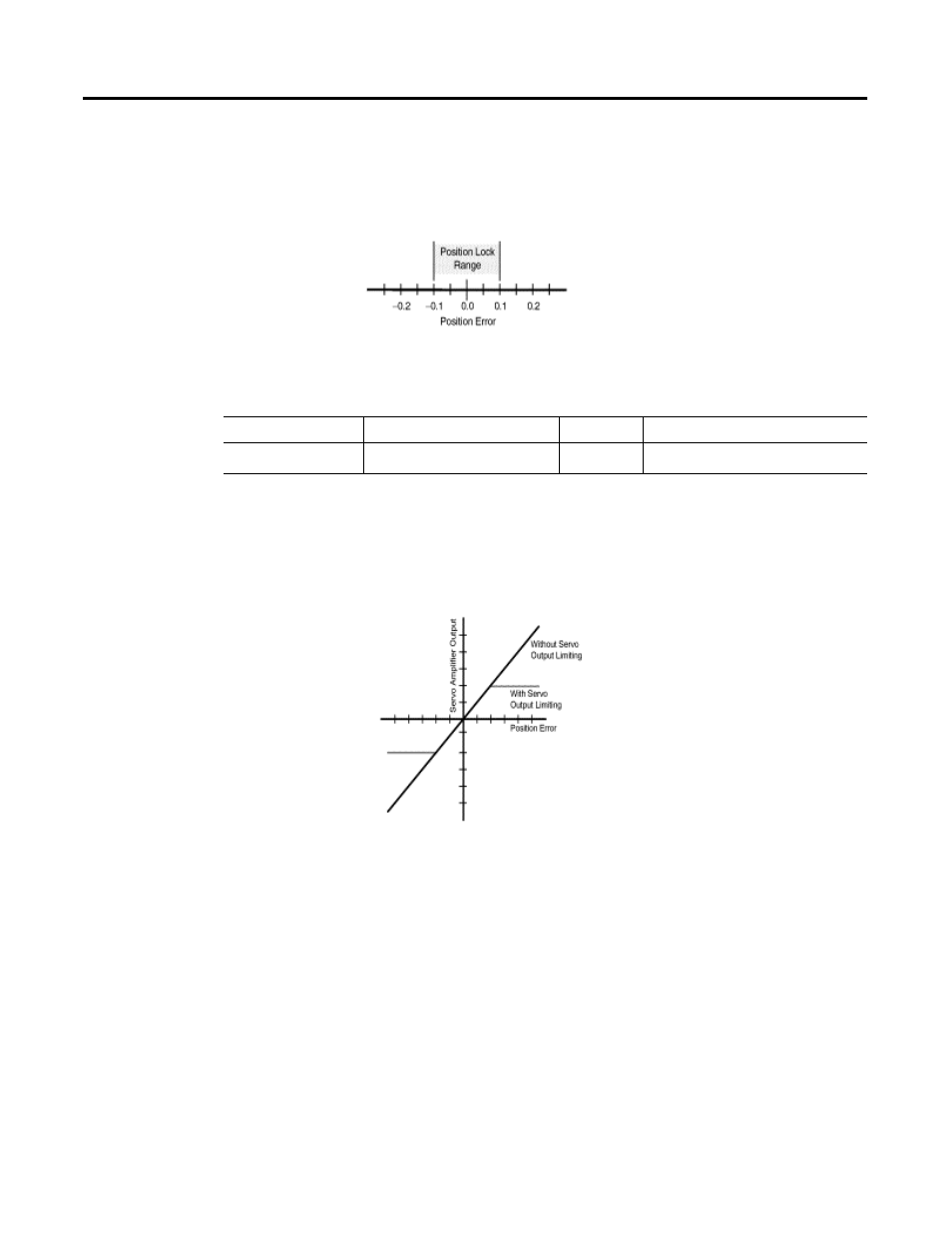
The position lock tolerance value is interpreted as a ± quantity. For example, if
your position units are Inches, specifying a position lock tolerance of 0.01
provides a minimum positioning accuracy of ±0.01 inches as shown in the
following diagram.
Figure 13.14 Position Lock
Output Limit
The Output Limit attribute provides a method of limiting the maximum servo
output voltage of a physical axis to a specified level. The servo output for the
axis as a function of position servo error, both with and without servo output
limiting, is shown below.
Figure 13.15 Servo Output Limit
The servo output limit may be used as a software current or torque limit if you
are using a servo drive in torque (current) loop mode. The percentage of the
drive’s maximum current that the servo controller will ever command is equal
to the specified servo output limit. For example, if the drive is capable of 30
Amps of current for a 10 Volt input, setting the servo output limit to 5V limits
the maximum drive current to 15 Amps.
GSV/SSV Access
Attribute Name
Data Type
Values
SSV/GSV
Position Lock Tolerance
REAL
Position Units