Position servo with velocity servo drive, Servo config = position servo – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 334
Publication 1784-UM003A-EN-P – June 2003
326 Motion Object Attributes
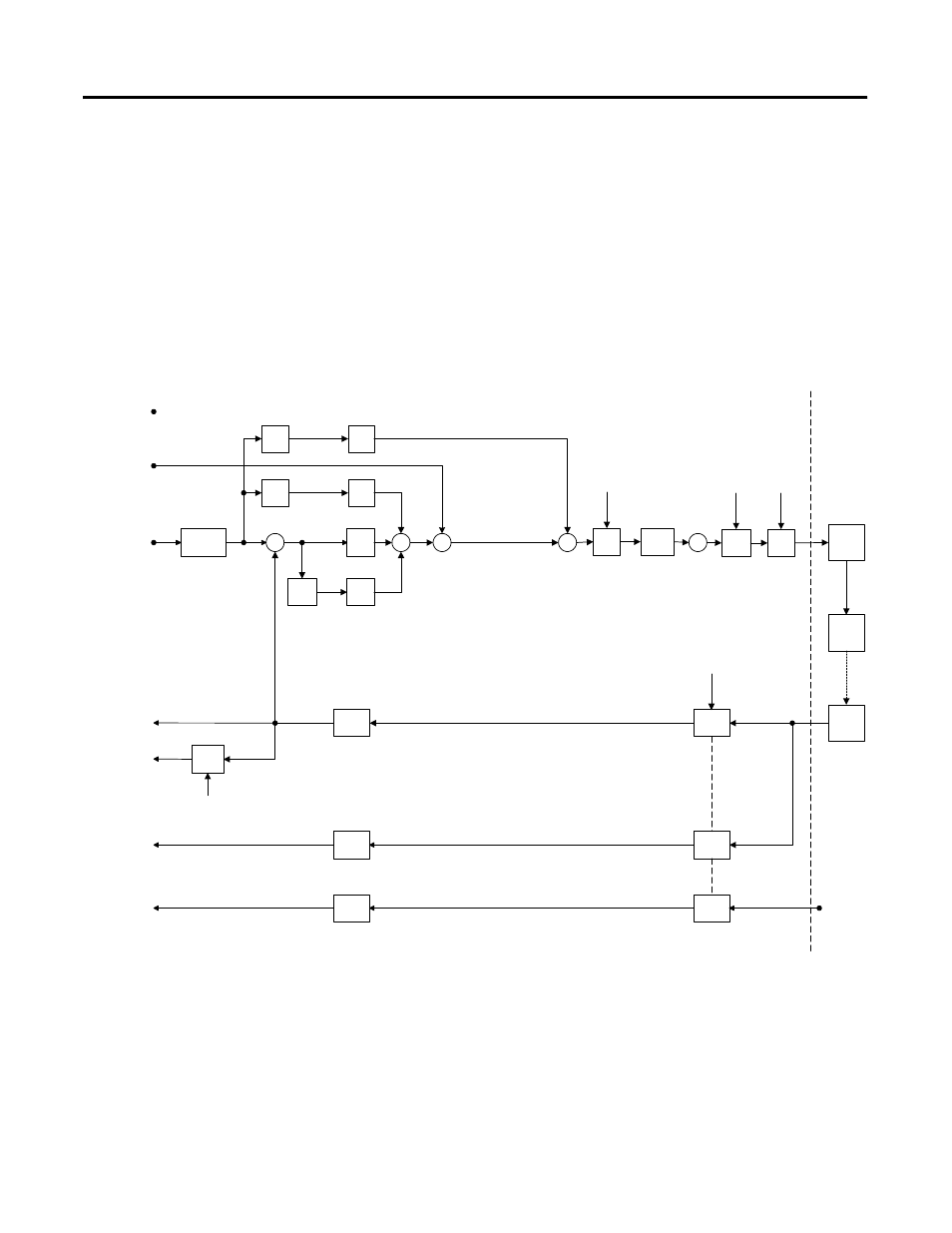
Position Servo with Velocity Servo
Drive
This configuration provides full position servo control using an external
velocity loop servo drive. Note that in this configuration the servo module
does not close the velocity loop, but rather the drive does. Synchronous input
data to the servo loop includes Position Command and Velocity Offset.
(Torque Offset is ignored.) These values are updated at the coarse update rate
of the associated motion group. The Position Command value is derived
directly from the output of the motion planner, while the Velocity Offset value
is derived from the current value of the corresponding attributes. The Velocity
Offset attribute can be changed programmatically via SSV instructions which,
when used in conjunction with future Function Block programs, provides
custom “outer” control loop capability.
Figure 13.10 Position Servo with Velocity Servo Drive
Pos P
Gain
Pos I
Gain
Vel
FF
Gain
d/dt
Error
Accum
-ulator
Position
Error
Output
Limit
Position
Accum-
ulator
Σ
Σ
Σ
Position
Command
(Coarse)
Fine
Interpolator
Position
Command
Velocity
Command
Velocity
Feedback
16-bit
Encoder
Counter
Position
Integrator
Error
Marker
Latch
Velocity
Servo
Drive
Ch Z
Marker
Input
Marker
Event
Handler
Regist.
Event
Handler
Watch
Event
Handler
Watch
Event
Registration
Event
Homing
Event
Regist.
Latch
Registration
Input
Acc
FF
Gain
d
2
/dt
Σ
16 Bit
DAC
Position
Feedback
(Coarse)
Position
Feedback
Low
Pass
Filter
Output
Scaling
Friction
Comp.
Output
Offset
&
Servo
Polarity
Servo
Output
Level
Output
Filter
BW
Encoder
Polarity
Velocity
Offset
Watch
Position
Torque
Offset
Σ
AQB
Encoder
Ch A/B
Encoder
Input
Motor
Servo Config = Position Servo