Drive fault normally closed, Axis info select, Servo polarity bits – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 330
Publication 1784-UM003A-EN-P – June 2003
322 Motion Object Attributes
Drive Fault Normally Closed
The Drive Fault Normally Closed bit attribute controls the sense of the Drive
Fault input to the servo module. If this bit is set (true) then during normal
(fault-free) operation of the drive, the Drive Fault input should be active, i.e. 24
Volts. If a drive fault occurs, the drive will open its drive fault output contacts
and remove 24 Volts from the servo module’s Drive Fault input generating an
axis Drive Fault condition. This is the default “fail-safe” configuration. In
some cases it may be necessary to clear the Drive Fault Normally Closed bit to
interface with a drive system that closes its contacts when faulted. This is
generally not recommended for “fail-safe” operation.
Axis Info Select
Servo Polarity Bits
Axis Info Select attributes are used to enable periodic data updates for selected
servo status attributes. This method of accessing servo status data is designed
to reduce the flow of unnecessary data for the Servo module. By selecting the
servo status attribute of interest from the enumerated list, this attribute’s value
is transmitted along with the actual position data to the Logix processor. Thus,
the servo status data update time is precisely the coarse update period. Note, if
a GSV is done to one of these servo status attributes without having selected
this attribute via the Drive Info Select attribute, the attribute value is static and
does not reflect the true value in the servo module.
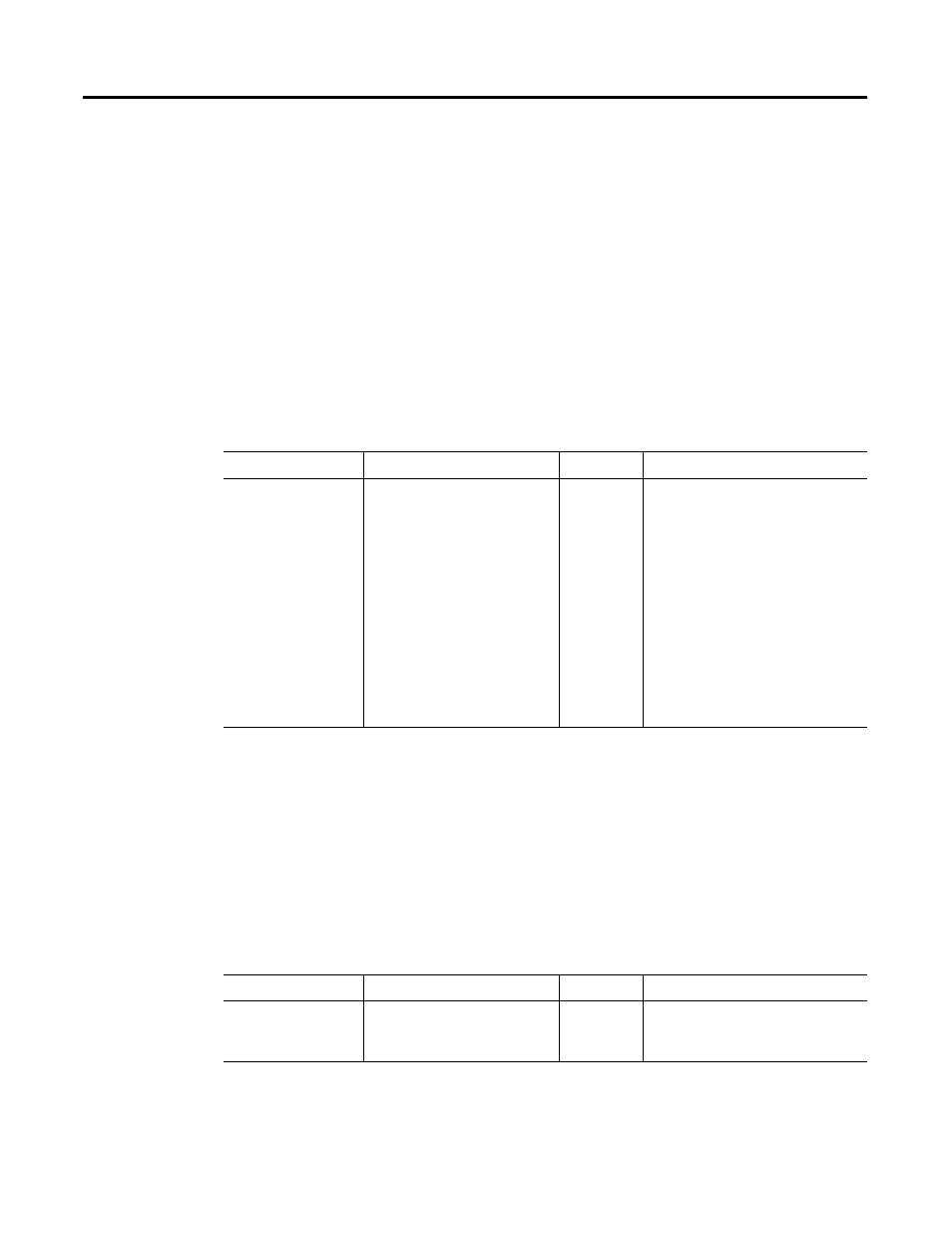
GSV/SSV Access
Attribute Name
Data Type
Values
GSV
Axis Info Select 1
Axis Info Select 2
DINT
0 = None (default)
1 = Position Command
2 = Position Feedback
3 = Aux Position Feedback
4 = Position Error
5 = Position Int. Error
6 =Velocity Command
7 = Velocity Feedback
8 = Velocity Error
9 = Velocity Int. Error
10 = Accel. Command
11 = Accel. Feedback
12 = Servo Output Level
13 = Marker Distance
GSV/SSV Access
Attribute Name
Data Type
Values
GSV
Servo Polarity Bits
DINT
0: Feedback Polarity Negative
1: Servo Polarity Negative
2-31: Reserved