Integrator hold, Manual adjust – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 141
Publication 1784-UM003A-EN-P – June 2003
Naming & Configuring Your Motion Axis 133
Due to the destabilizing nature of Integral Gain, it is recommended that
Position Integral Gain and Velocity Integral Gain be considered mutually
exclusive. If Integral Gain is needed for the application, use one or the other,
but not both. In general, where static positioning accuracy is required, Position
Integral Gain is the better choice.
The typical value for the Velocity Proportional Gain is ~15 mSec-2.
Integrator Hold
If the Integrator Hold parameter is set to:
• Enabled, the servo loop temporarily disables any enabled position or
velocity integrators while the command position is changing. This
feature is used by point-to-point moves to minimize the integrator
wind-up during motion.
• Disabled, all active position or velocity integrators are always enabled.
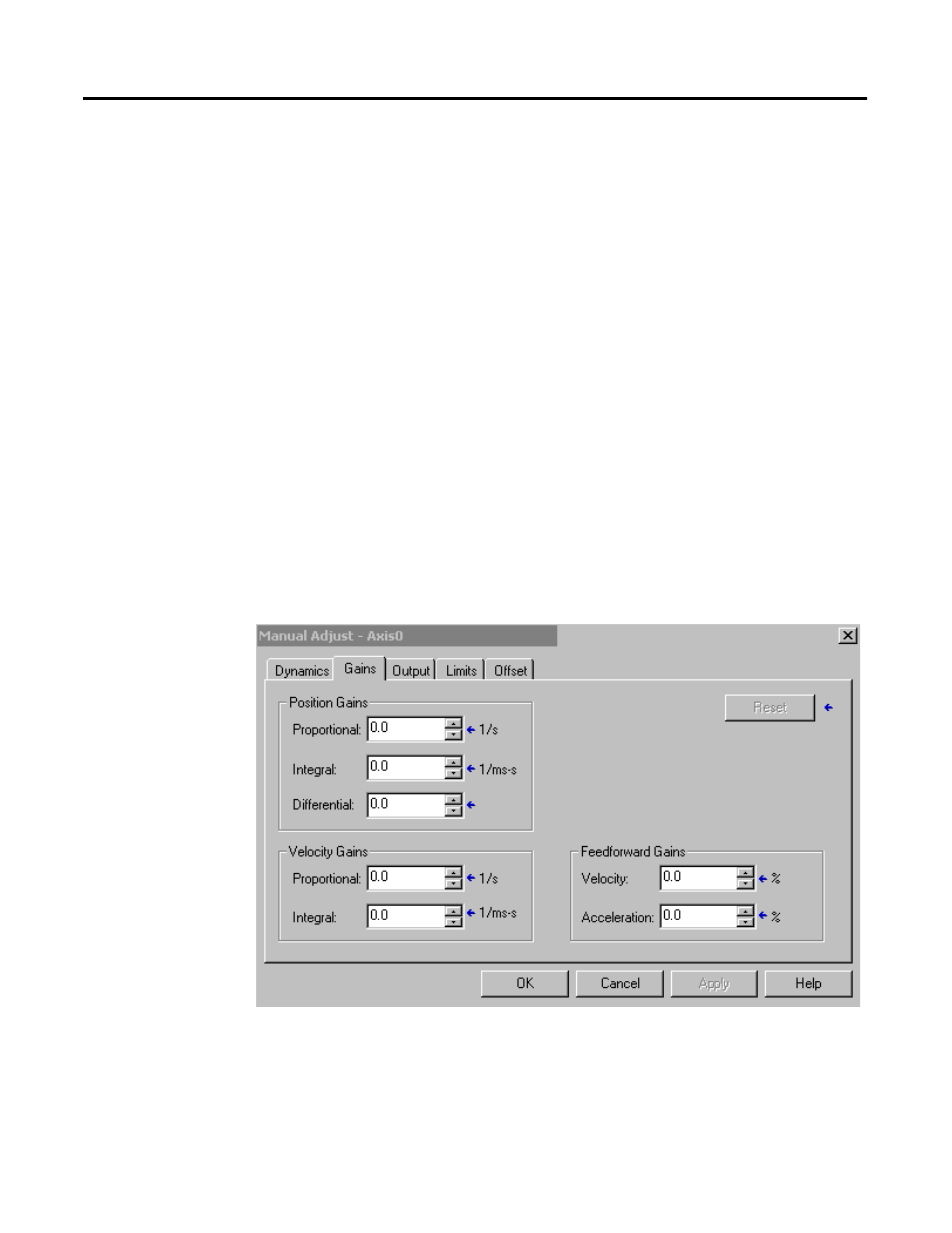
Manual Adjust
Click on this button to access the Gains tab of the Manual Adjust dialog for
online editing.
Figure 6.27 Axis Properties - Gains Tab Manual Adjust Screen for Axis_Servo
Note: The Manual Adjust button is disabled when RSLogix 5000 is in
Wizard mode, and when you have not yet saved or applied your offline
edits to the above parameters.