Aux position feedback, Position error, Position integrator error – Rockwell Automation 1784-PM16SE SoftLogix Motion Card Setup and Configuration Manual User Manual
Page 311: Velocity command
Publication 1784-UM003A-EN-P – June 2003
Motion Object Attributes 303
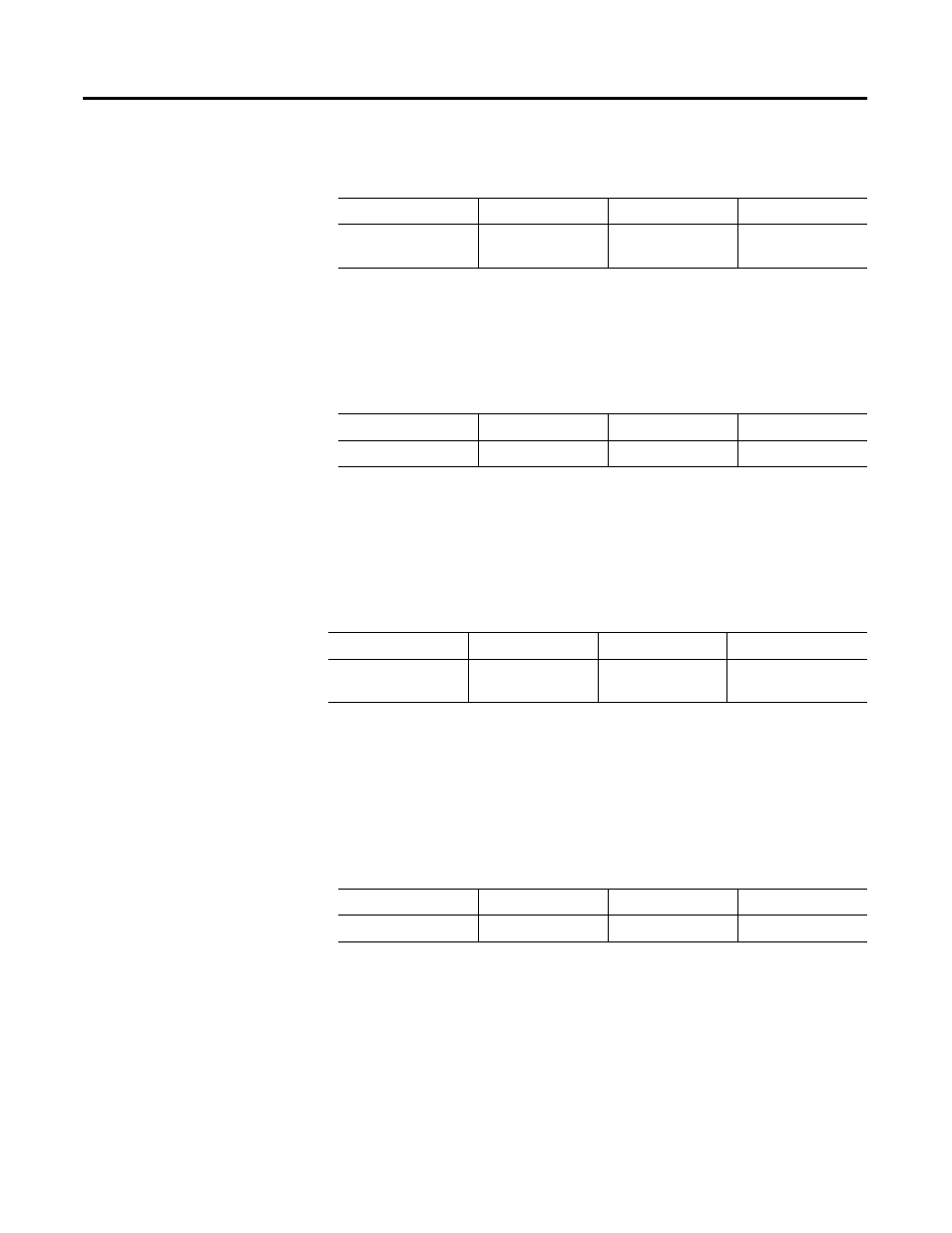
Aux Position Feedback
Aux Position Feedback is the current value of the position feedback coming
from the auxiliary feedback input.
Position Error
Position Error is the difference, in configured axis Position Units, between the
command and actual positions of a servo axis. For an axis with an active servo
loop, position error is used, along with other error terms, to drive the motor to
the condition where the actual position is equal to the command position.
Position Integrator Error
Position Integrator Error is the running sum of the Position Error, in the
configured axis Position Units, for the specified axis. For an axis with an active
servo loop, the position integrator error is used, along with other error terms,
to drive the motor to the condition where the actual position is equal to the
command position.
Velocity Command
Velocity Command is the current velocity reference to the velocity servo loop,
in the configured axis Position Units per Second, for the specified axis. The
Velocity Command value, hence, represents the output of the outer position
control loop. Velocity Command is not to be confused with Command
Velocity, which represents the rate of change of Command Position input to
the position servo loop.
GSV/SSV Access
Attribute Name
Data Type
Values
GSV Aux
Position
Feedback
REAL
Position Units
GSV/SSV Access
Attribute Name
Data Type
Values
GSV
Position Error
REAL
Position Units
GSV/SSV Access
Attribute Name
Data Type
Values
GSV Position
Integrator
Error
REAL
Position Units - mSec
GSV/SSV Access
Attribute Name
Data Type
Values
GSV
Velocity Command
REAL
Position Units / Sec