Yaskawa MP2200 Machine Controller User Manual
Page 83
3.1 SVB-01 Module Setup
3-11
■
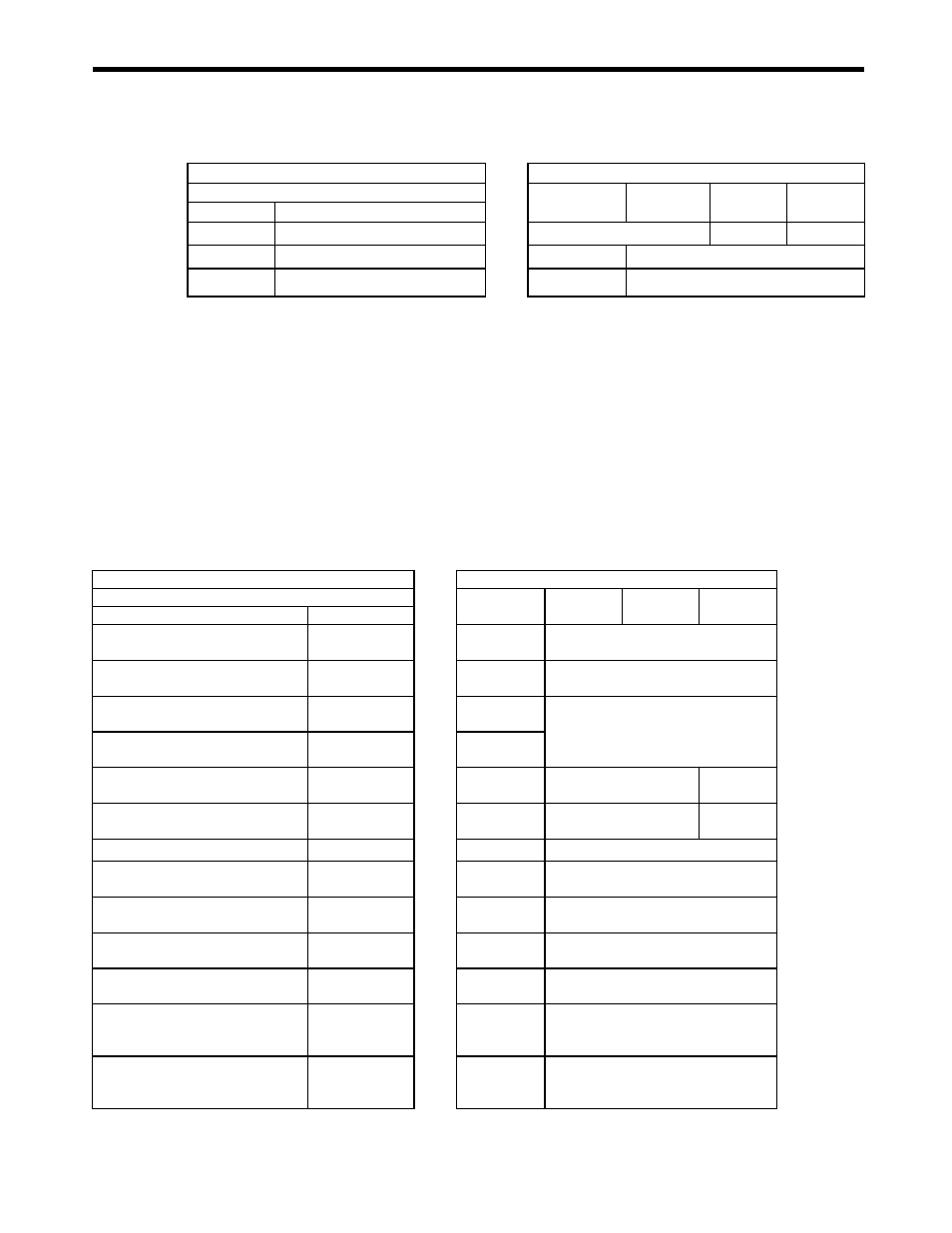
SVB-01 Module to SERVOPACK
(Note)1. The default settings are written if the axis is not set.
2. When the axis has been set, parameters are written only when bit 10 of fixed
parameter 1 is set to enable automatic updating of parameters.
3. The positioning completed width is written only when MECHATROLINK-II
(32-byte mode) is used.
4. The above parameters are written to the SERVOPACK’s RAM.
[ c ] SERVOPACK Parameters
The SERVOPACK parameters are automatically set, as shown below.
These settings, however, are not written to the set values for the SERVOPACK parameters saved in
the SVB-01 Module.
The MPE720 is required to change SERVOPACK parameters in the SVB-01 Module. For details,
refer to ( 4 ) SVB Definitions of 3.1.3 Module Configuration Definitions.
(Note)1. The above processing is not performed when the axis has been set.
2. The above set values are written to the SERVOPACK’s EEPROM.
SVB-01 Module
SERVOPACK
Setting Parameters
SGD-N, SGDB-
N
SGDH+
NS100
SGDH+
NS115
SGDS
Address
Name
OL1E
Positioning Completed Width
→
−
Pn500
Pn522
OL36
Linear Acceleration Time
→
Cn-0020
Pn80B
OL38
Linear Deceleration Time
→
−
Pn80E
SVB-01 Module
SERVOPACK
SERVOPACK Parameters
SGD-N,
SGDB-N
SGDH+
NS100
SGDH+
NS115
SGDS
Name
Set Value
P-OT Signal Mapping
Not valid.
→
Cn-0001
Bit 2
Pn50A.3
N-OT Signal Mapping
Not valid.
→
Cn-0001
Bit 3
Pn50B.0
SERVOPACK Software Limit
Function (Positive)
Not valid.
→
Cn-0014
Bit 2
Pn801.0
SERVOPACK Software Limit
Function (Negative)
Not valid.
→
Cn-0014
Bit 3
SERVOPACK Electronic Gear
Ratio (Numerator)
1
→
Cn-0024
Pn202
Pn20E
SERVOPACK Electronic Gear
Ratio (Denominator)
1
→
Cn-0025
Pn203
Pn210
Autotuning Application Switch
Not valid.
→
−
Pn110
/DEC Signal Mapping
CN1-9 input
terminal
→
−
Pn511.0
/EXT1 Signal Mapping
CN1-10 input
terminal
→
−
Pn511.1
/EXT2 Signal Mapping
CN1-11 input
terminal
→
−
Pn511.2
/EXT3 Signal Mapping
CN1-12 input
terminal
→
−
Pn511.3
Speed Reference Command
Options
Use T-REF as
external torque
limit value.
→
−
Pn002.0
Torque Reference Command
Options
Use V-REF as
external speed
limit input.
→
−
Pn002.1