3 torque control, 3 torque control -14, 1 ) motion parameters for torque control – Yaskawa MP2200 Machine Controller User Manual
Page 370: A ] fixed parameters
6 Control Block Diagrams
6.1.3 Torque Control
6-14
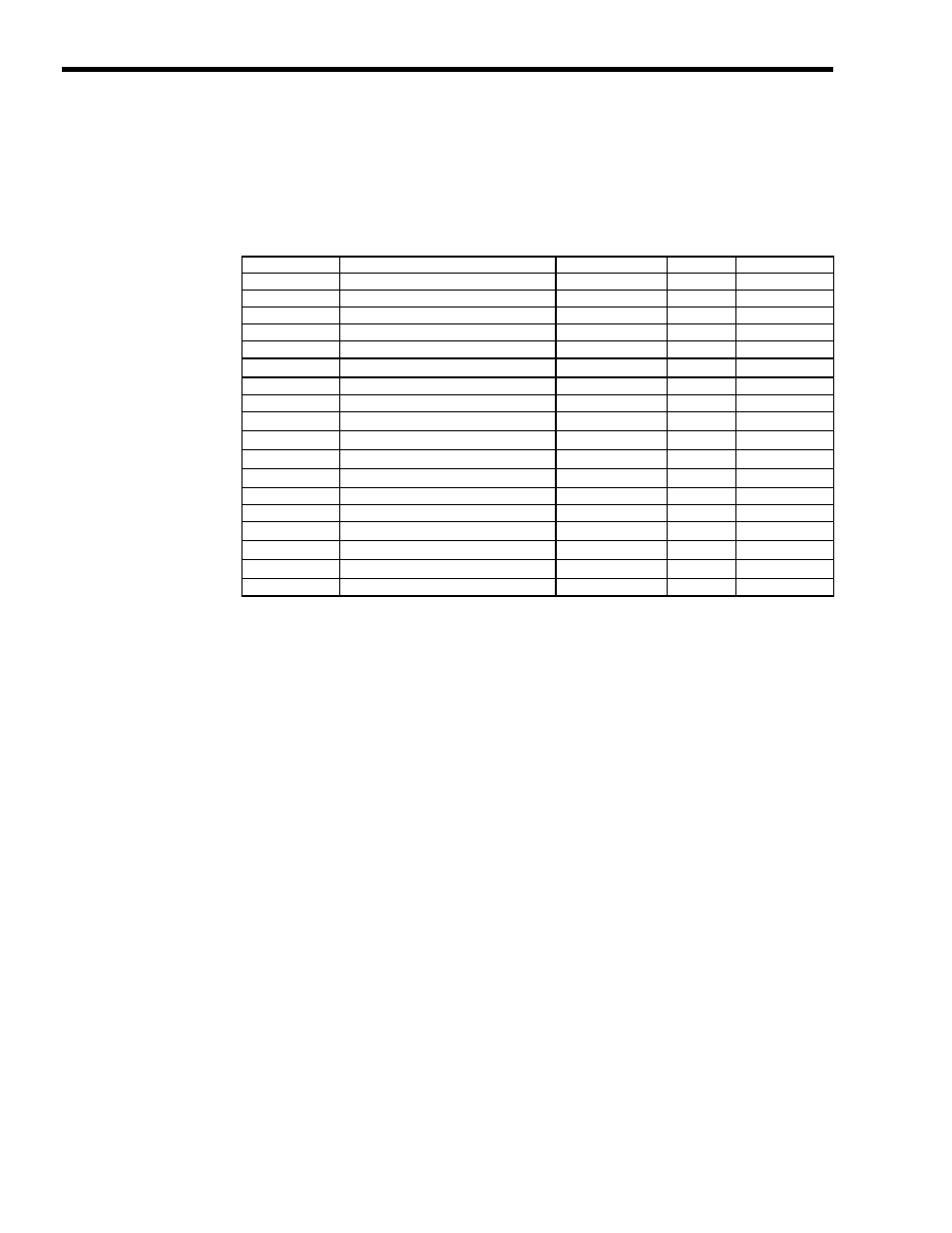
6.1.3 Torque Control
( 1 ) Motion Parameters for Torque Control
[ a ] Fixed Parameters
No.
Name
Setting Unit
Default Value
Setting Range
0
Run Mode
−
1
0 to 5
1
Function Selection 1
−
0000h
Bit setting
2
Function Selection 2
−
0000h
Bit setting
4
Command Unit
−
0
0 to 3
5
Number of Decimal Places
−
3
0 to 5
6
Command Unit per Revolution
Reference unit
10000
1 to 2
31
−1
8
Gear Ratio (Motor)
−
1
1 to 65535
9
Gear Ratio (Load)
−
1
1 to 65535
10
Maximum Value of Rotary Counter (POSMAX)
Reference unit
360000
1 to 2
31
−1
12
Forward Software Limit
Reference unit
2
31
−1
−2
31
to 2
31
−1
14
Reverse Software Limit
Reference unit
−2
31
−2
31
to 2
31
−1
16
Backlash Compensation
Reference unit
0
−2
31
to 2
31
−1
29
Motor Type
−
0
0, 1
30
Encoder Type
−
0
0 to 3
34
Rated Speed
min
−1
3000
1 to 32000
36
Encoder Resolution
pulse
65536
1 to 2
31
−1
38
Max. Revolution of Absolute Encoder
Rev
65534
0 to 2
31
−1
42
Feedback Speed Moving Average Time Constant
ms
10
0 to 32