Yaskawa MP2200 Machine Controller User Manual
Page 170
4 Motion Parameters
4.3.3 Motion Monitoring Parameter Details
4-50
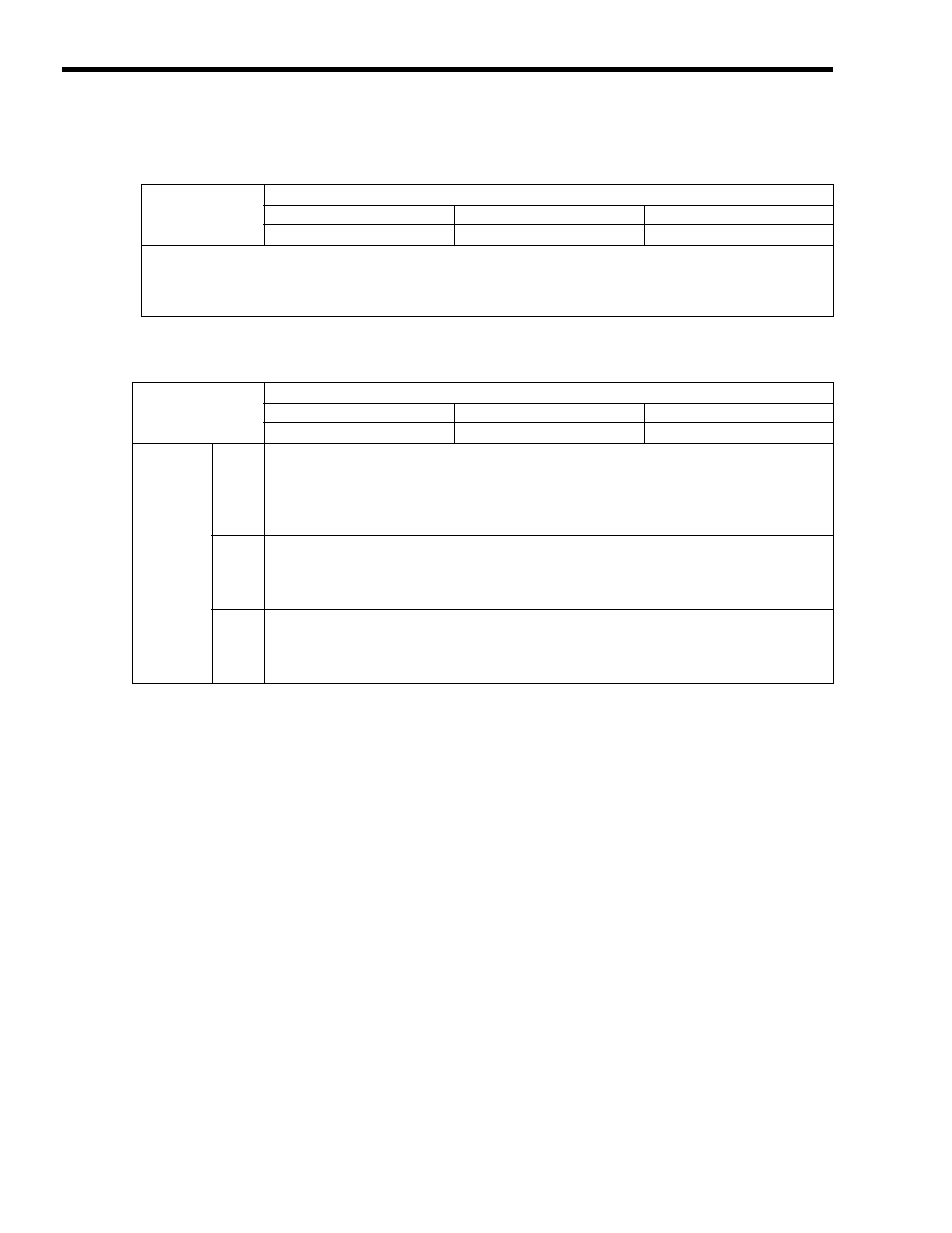
( 7 ) Motion Subcommand Response Code
( 8 ) Motion Subcommand Status
IW0A
Motion Subcommand Response Code
Range
Unit
0 to 65535
−
Stores the motion subcommand code that is being executed.
This is the motion subcommand code that is currently being executed and is not necessarily the same as the Motion
Subcommand (setting parameter OW0A).
(
Note) Subcommands are used by the system for latch commands and reading/writing parameters.
IW0B
Motion Subcommand Status
Range
Unit
−
−
IW0B
Bit 0
Command Executing (BUSY)
This bit indicates the motion subcommand status.
OFF: READY (completed)
ON: BUSY (processing)
This bit turns ON during execution of commands that have completions or during abort processing.
Bit 3
Command Error Occurrence (FAIL)
This bit turns ON if motion subcommand processing does not complete normally.
OFF: Normal completion
ON: Abnormal completion
Bit 8
Command Execution Completed (COMPLETE)
This bit turns ON when motion subcommand processing completes normally.
OFF: Normal execution not completed
ON: Normal execution completed