3 no command (nop), 3 no command (nop) -117, 1 ) related parameters – Yaskawa MP2200 Machine Controller User Manual
Page 347
5.3 Motion Subcommands
5-117
5.3.3 No Command (NOP)
Set this command when a subcommand is not being specified.
When the MECHATROLINK-II (32 byte) communications method is being used, User Monitor 4
can be used, just as with the Monitor Status (SMON) subcommand. Refer to 5.3.6 Monitor Status
(SMON) for details.
( 1 ) Related Parameters
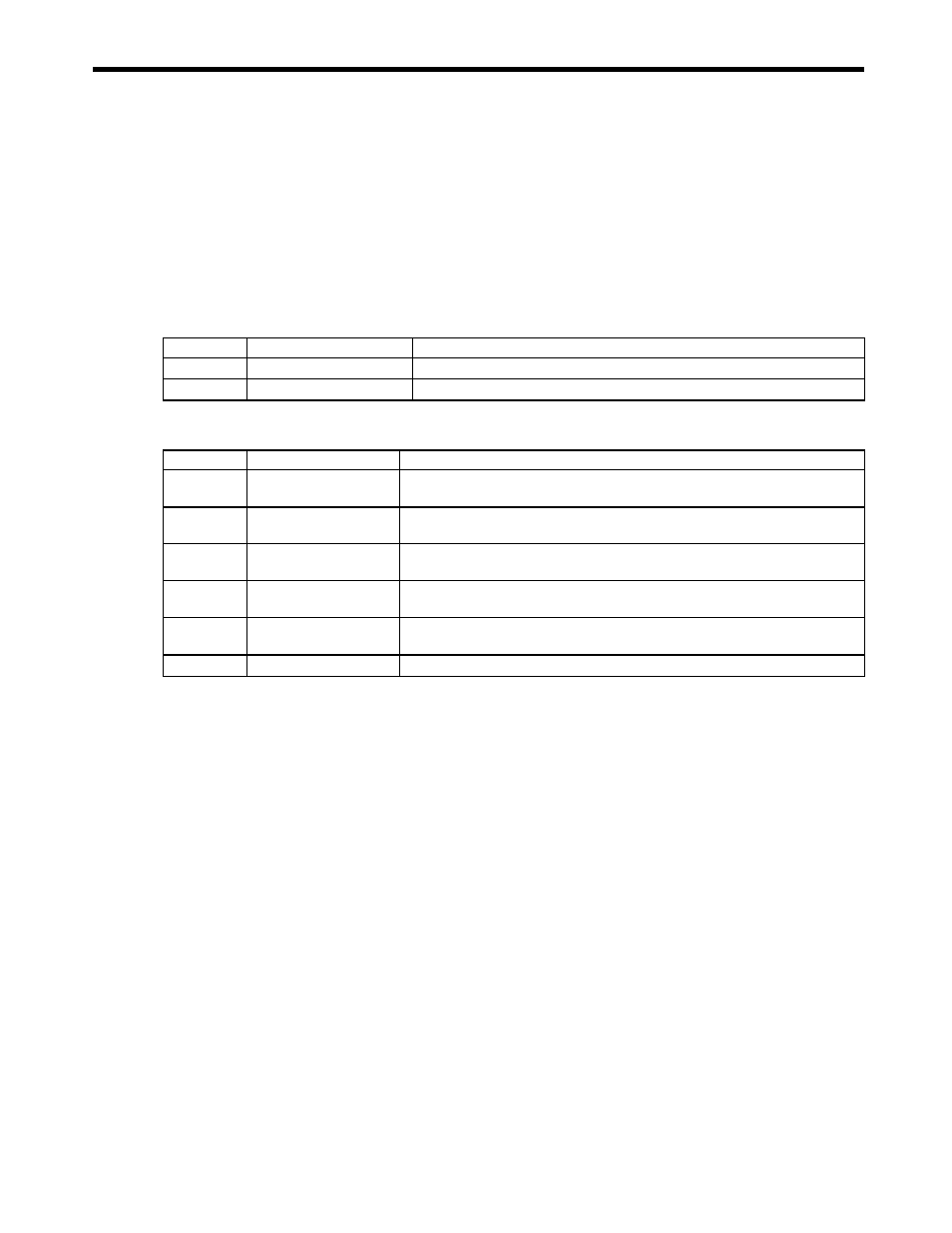
[ a ] Setting Parameters
[ b ] Monitoring Parameters
* The NOP command's subcommand status stored in Command Execution Completed
(COMPLETE) is not defined.
Parameter
Name
Setting Contents
OW0A
Motion Subcommand
Set to 0 to specify no command (NOP).
OW4E
Servo User Monitor
Set the information to manage the servo driver that will be monitored.
Parameter
Name
Monitoring Contents
IW0A
Motion Subcommand
Response Code
Indicates the motion subcommand that is being executed.
The response code is 0 during NOP command execution.
IB0B0
Command Executing
Turns ON during NOP command execution and turns OFF when execution has been
completed.
IB0B3
Command Error End
Turns ON if an error occurs during NOP command execution. Turns OFF when
another command is executed.
IB0B8
Command Execution
Completed *
Turns ON when NOP command execution has been completed.
IW2F
Servo Driver User
Monitor Information
Stores either the data actually being monitored in the user monitor or the monitor
selection.
IL34
Servo User Monitor 4
Stores the result of the selected monitor.