2 sva-01 module control block diagram, 2 sv, 2 sva-01 module control block diagram -26 – Yaskawa MP2200 Machine Controller User Manual
Page 382: Continued on next page)
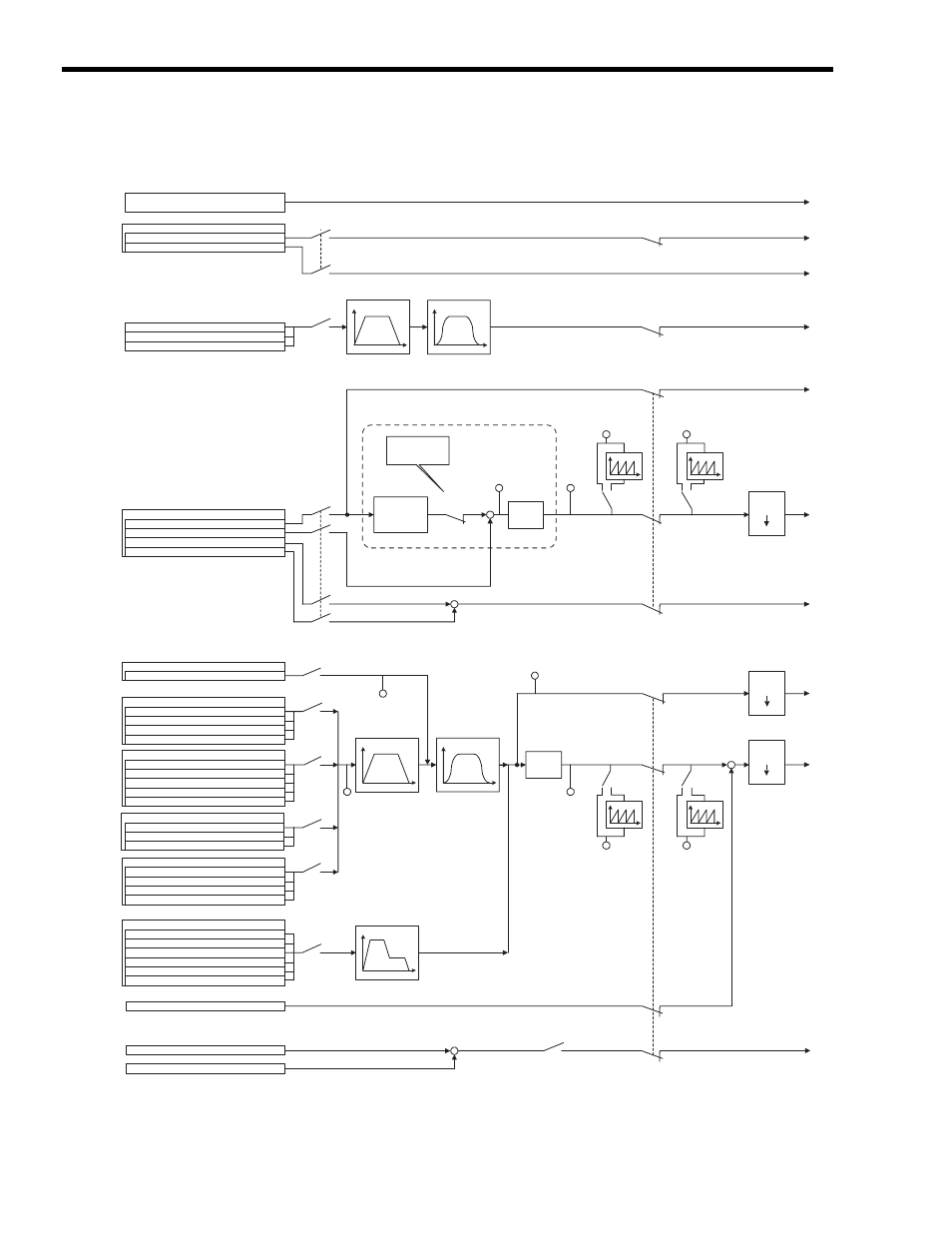
6 Control Block Diagrams
6.1.4 Speed Control
6-26
6.2 SVA-01 Module Control Block Diagram
Zero point return
DPOS
IL
14
CPOS
IL
10
MPOS
IL
12
TPOS
(IL
0E)
(IW
0C, bit 6)
+
Phase reference generation
Calculate position
change equivalent
to speed
reference.
Command
position
calculation
Reference Position
Increment Monitor
IL
1C
CPOS
IL
10
Finite
length
MPOS
IL
12
PHREFOFF
(OW
05, bit 1)
+
Accel/decel filter
Asymmetric
trapezoidal accel.
INTERPOLATE
/LATCH
POSING
EX_POSING
FEED
STEP
ZRET
PHASE
VELO
TRQ
TPOS
(IL
0E)
Machine lock status
(IW
0C, bit 6)
+
DPOS
IL
14
Cut for
electronic cam.
+
+
(IW
0C, bit 6)
(IW
0C, bit 6)
Speed Compensation
during Position Control
(OW
01, bit 2)
Machine lock status
Machine lock status
Unit
conversion
[UNIT]
[pulse]
Machine lock status
IL
1C
OL
24: Position Compensation
OW
31: Speed Amends
OL
10: Speed Reference
OL
1C: Position Reference Setting
OL
36: Accel/Accel Time Constant
OL
38: Decel/Decel Time Constant
Positioning (POSING) Command
OL
10:
OL
1C:
OL
36:
OL
38:
External Positioning (EX_POSING) Command
OL
10:
OL
36:
OL
38:
JOG Operation (FEED) Command
OL
46: External Positioning Move Distance
OL
10:
OL
36:
OL
38:
STEP Operation (STEP) Command
OL
44: Step Distance
OL
1C: Position Reference
Interpolation (INTERPOLATE/LATCH) Command
OW
3C:Home Return Type
Zero Point Return (ZRET) Command
OW
3D:Home Window
OL
3E: Approach Speed
OL
40: Creep Speed
OL
42: Home Offset
OL
10: Speed Reference
OL
28: Phase Compensation
Phase Control (PHASE) Command
OL
10: Speed Reference
OW
31:Speed Amends
OL
10: Speed Reference
OL
36: Accel/Accel Time Constant
OL
38: Decel/Decel Time Constant
Speed Reference (VELO) Command
Torque Reference (TRQ) Command
OL
0C: Torque Reference
OW
0E: Speed Limit at Torque Reference
OL
14: Positive Side Limiting Torque
Setting at Speed Reference
OL
16: Secondly Speed Compensation
OL
16:
Secondly Speed Compensation
(b)
(a)
(c)
(d)
(e)
(f)
(h)
(i)
(j)
(g)
Infinite
length
Speed Reference
Position Reference Setting
Accel/Accel Time Constant
Decel/Decel Time Constant
Speed Reference
Accel/Accel Time Constant
Decel/Decel Time Constant
Speed Reference
Accel/Accel Time Constant
Decel/Decel Time Constant
Finite
length
Infinite
length
Finite
length
Infinite
length
Finite
length
Infinite
length
Unit
conversion
[UNIT]
[pulse]
Unit
conversion
[UNIT]
[pulse]
Command
position
calculation
Reference Position
Increment Monitor
Accel/decel filter
Asymmetric
trapezoidal accel.
(continued on next page)