Yaskawa MP2200 Machine Controller User Manual
Page 136
4 Motion Parameters
4.2.3 Monitoring Parameter List
4-16
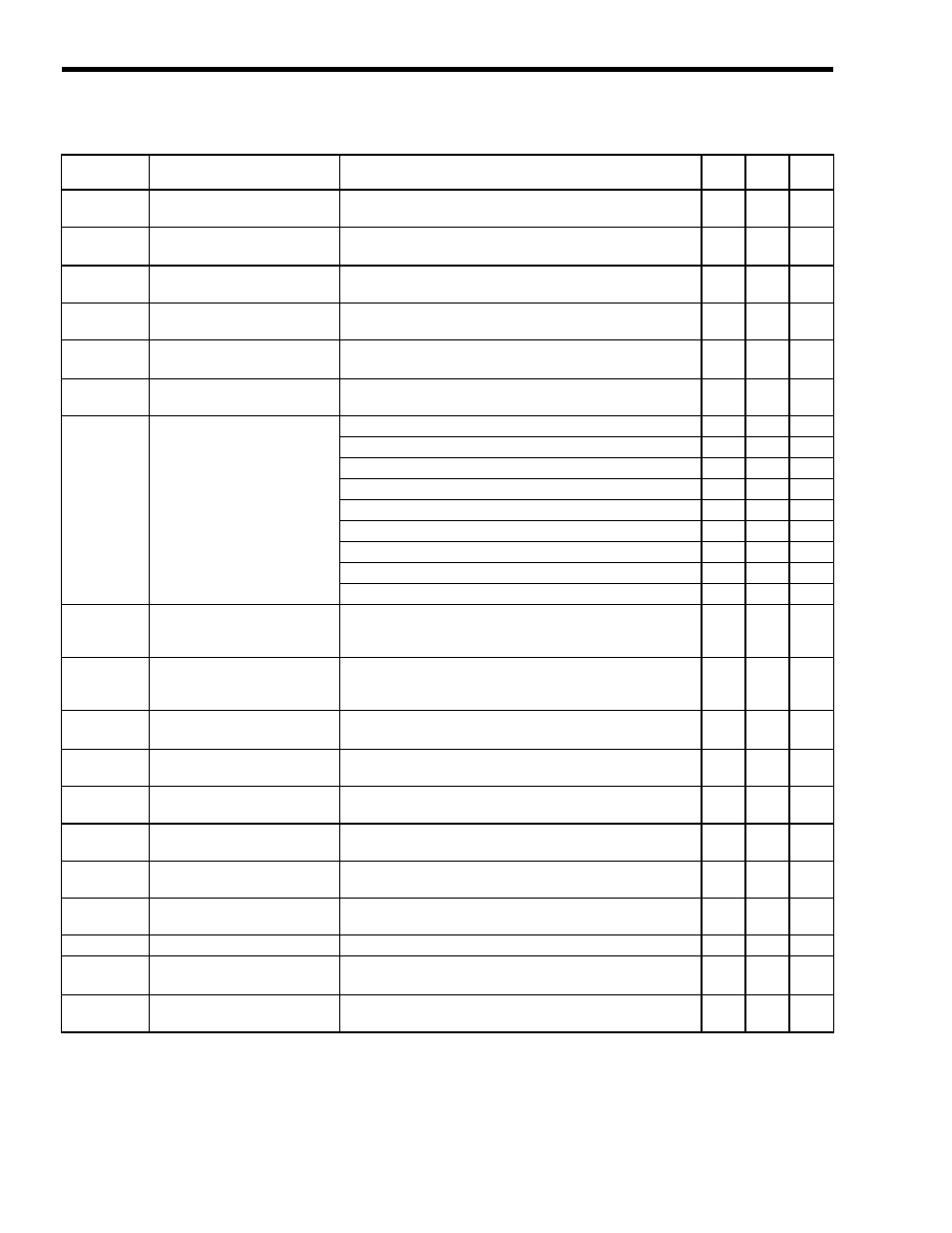
IL42
Torque (Thrust) Reference
Monitor
Unit is according to OW03, bits 12 to 15 (Torque Unit).
Yes
Yes
Yes
IW44
to IW49
-
Reserved
IL4A
Absolute Encoder
Cumulative Revolutions
1 = 1 revolution
Yes
IL4C
Initial Number of
Incremental Pulses
1 = 1 pulse
Yes
IW4E
to IW55
-
Reserved
IL56
Fixed Parameter Monitor
Stores the data of the fixed parameter when FIXPRM-RD has
been specified in the Motion Subcommand.
Yes
Yes
Yes
IW58
General-purpose Digital
Input (DI) Monitor
Bit 0: General-purpose DI_0
Yes
Bit 1: General-purpose DI_1
Yes
Bit 2: General-purpose DI_2
Yes
Bit 3: General-purpose DI_3
Yes
Bit 4: General-purpose DI_4
Yes
Bit 5: General-purpose DI_5
Yes
Bit 6: Reserved
Bit 7: PG Disconnected Status (ON: Normal/OFF: Error)
Yes
Bits 8 to F: Reserved
IW59
General-purpose AI Monitor 1
1 = 0.001 V
In factory adjustment mode, stores the contents of the FPGA
register.
Yes
IW5A
General-purpose AI Monitor 2
1 = 0.001 V
In factory adjustment mode, stores the contents of the FPGA
register.
Yes
IW5B
to IW5C
-
Reserved
IL5E
Absolute Position at Power
OFF (Lower 2 Words)
1 = 1 pulse
Yes
Yes
IL60
Absolute Position at Power
OFF (Upper 2 Words)
1 = 1 pulse
Yes
Yes
IL62
Modularized Position at Power
OFF (Lower 2 Words)
1 = 1 pulse
Yes
Yes
IL64
Modularized Position at Power
OFF (Upper 2 Words)
1 = 1 pulse
Yes
Yes
IL66
Monitor Data Status
Status for execution of the Write monitor data command.
(1: Normal response/
−1: Error)
Yes
IL68
Monitor Data
Read data
Yes
IW6A
to IW6F
-
Reserved
IW70
to IW7F
Response Buffer for
Transparent Command Mode
Stores the response data when MECHATROLINK Servo
commands are specified directly.
Yes
(cont’d)
Register No.
Name
Description
SVB
-01
SVA
-01
SVR