9 ) motion subcommands ( 10 ) torque reference – Yaskawa MP2200 Machine Controller User Manual
Page 150
4 Motion Parameters
4.3.2 Motion Setting Parameter Details
4-30
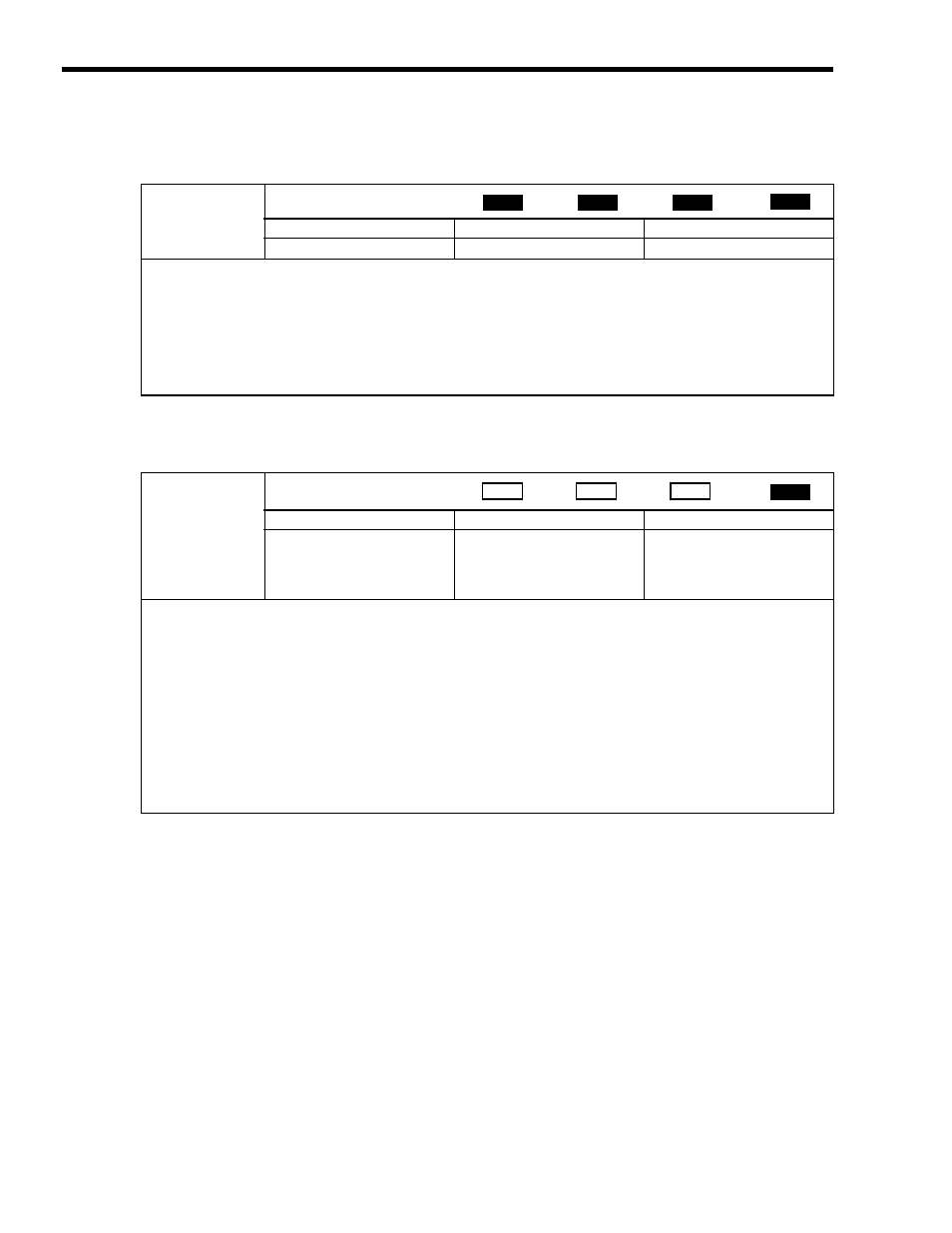
( 9 ) Motion Subcommands
( 10 ) Torque Reference
OW0A
Motion Subcommand
Setting Range
Setting Unit
Default Value
0 to 5
−
0
Set the motion subcommand to be used with the motion command.
0: NOP
No command
1: PRM_RD
Read SERVOPACK Parameter
2: PRM_WR
Write SERVOPACK Parameter
3: Reserved
Reserved.
4: SMON
Monitor Status
5: FIXPRM_RD
Read Fixed Parameters
These commands can be used only with MECHATROLINK-II in 32-byte mode, except for Read Fixed Parameters.
Position
Phase
Speed
Torque
OL0C
Torque Reference/Torque
Feed Forward Compensation
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Depends on the torque unit set
in Function 1 (setting
parameter OW03, bits C to
F).
0
The meaning will depend on the command.
• Set the torque reference for torque reference commands. Refer to 5.2.23 Torque Reference (TRQ) for details.
• Set the torque feed forward gain* for interpolation commands.
* Torque Feed Forward Gain Function
Torque feed forward gain can be used when interpolation commands (INTERPOLATE, LATCH) are sent using
SGDS SERVOPACKs.
Torque feed forward gain is set in Torque Reference (setting parameter OL0C).
Conditions of Use
• SERVOPACK parameter Pn002.0 = 2
• MP2300 software version 2.02 or later
• SGDS communication interface version 8 or later
Position
Phase
Speed
Torque