7 ) backlash compensation ( 8 ) hardware signals – Yaskawa MP2200 Machine Controller User Manual
Page 184
4 Motion Parameters
4.4.1 Motion Fixed Parameter Details
4-64
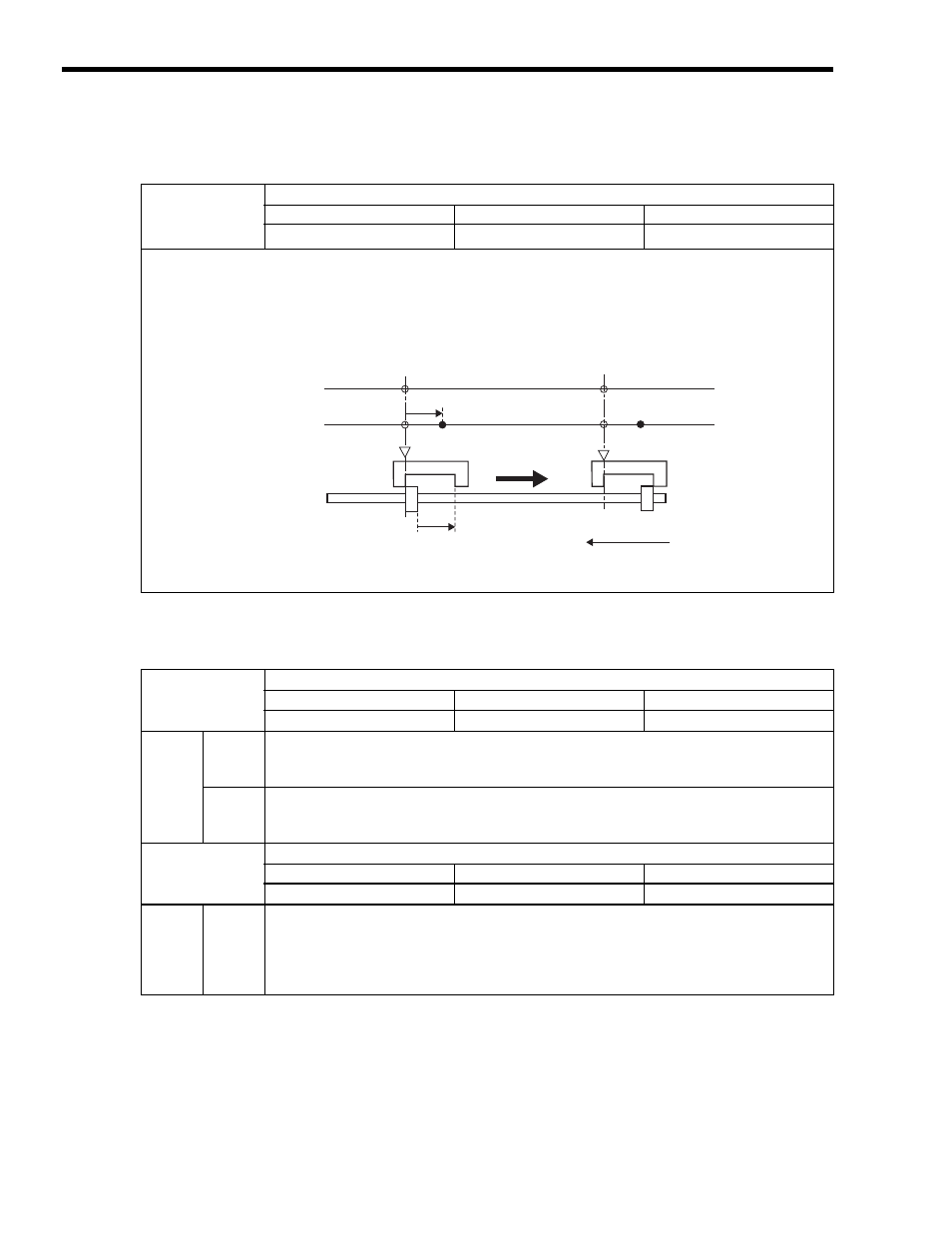
( 7 ) Backlash Compensation
( 8 ) Hardware Signals
No. 16
Backlash Compensation
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference unit
0
Set the backlash compensation in reference units.
Backlash compensation can be disabled by setting this parameter to 0.
The backlash compensation's compensation direction is the opposite of the Home Direction (setting parameter OW09, bit 3).
This parameter is used for the backlash compensation's compensation direction even with the Zero Point Return and Zero Point
Setting operations, which do not use the Home Direction (setting parameter OW09, bit 3).
The backlash compensation method is somewhat different for the SVB-01 Module.
Compensation
Backlash Compensation
in fixed parameter 16
Travels opposite
of Home Direction.
Machine
Machine
Motor axis
Motor axis
Home Direction
Reference position
Reference position
No. 20
Hardware Signal 1
Setting Range
Setting Unit
Default Value
Bit Setting
−
0000 Hex
No. 20
Bit 0
Pulse A/B Input Signal Polarity
0: Positive logic (default)
1: Negative logic
Bit 1
Pulse C Input Signal Polarity
0: Positive logic (default)
1: Negative logic
No. 21
Hardware Signal 2
Setting Range
Setting Unit
Default Value
Bit Setting
−
0000 Hex
No. 21
Bit 0
Deceleration Limit Switch Signal
Set the signal to use for DEC1.
0: Use the Deceleration Limit Switch for Zero Point Return (setting parameter OW05, bit 8).
(default)
1: Use the DI_5 signal.