2 ) holding and aborting – Yaskawa MP2200 Machine Controller User Manual
Page 290
5 Motion Commands
5.2.5 Latch (LATCH)
5-60
( 2 ) Holding and Aborting
The axis will decelerate to a stop if there is no change in the target position each high-speed scan.
The Command Pause bit (OB090) and the Command Abort bit (OB091) cannot be used.
Set the motion setting parameters.
• Target Position: OL1C
• Acceleration/Deceleration Filter Type:
OW03
• Speed Loop P/PI Switch: OW01
• Speed Feed Forward Compensation:
OW30
• Latch Signal Selection: OW04
• Speed feed forward compensation can be applied.
• Generate the target position data each high-speed scan from the ladder
program.
• The travel speed is calculated automatically.
• The Command Pause (OB090) cannot be used.
• The Command Abort (OB091) cannot be used.
• Change a motion command to stop interpolation execution.
• Select the latch signal from the SERVOPACK phase-C pulse,
/EXT1, /EXT2, or /EXT3 signals for the SVB-01 and from the CN1/
CN2 connector EXT, ZERO, or phase-C pulse for the SVA-01.
(
Note) Take into consideration the latch processing
time obtained from the following equation
when sending the LATCH command.
Latch processing time = 2 scans + MECHATROLINK
cycle + SERVOPACK
processing time (4 ms max.)
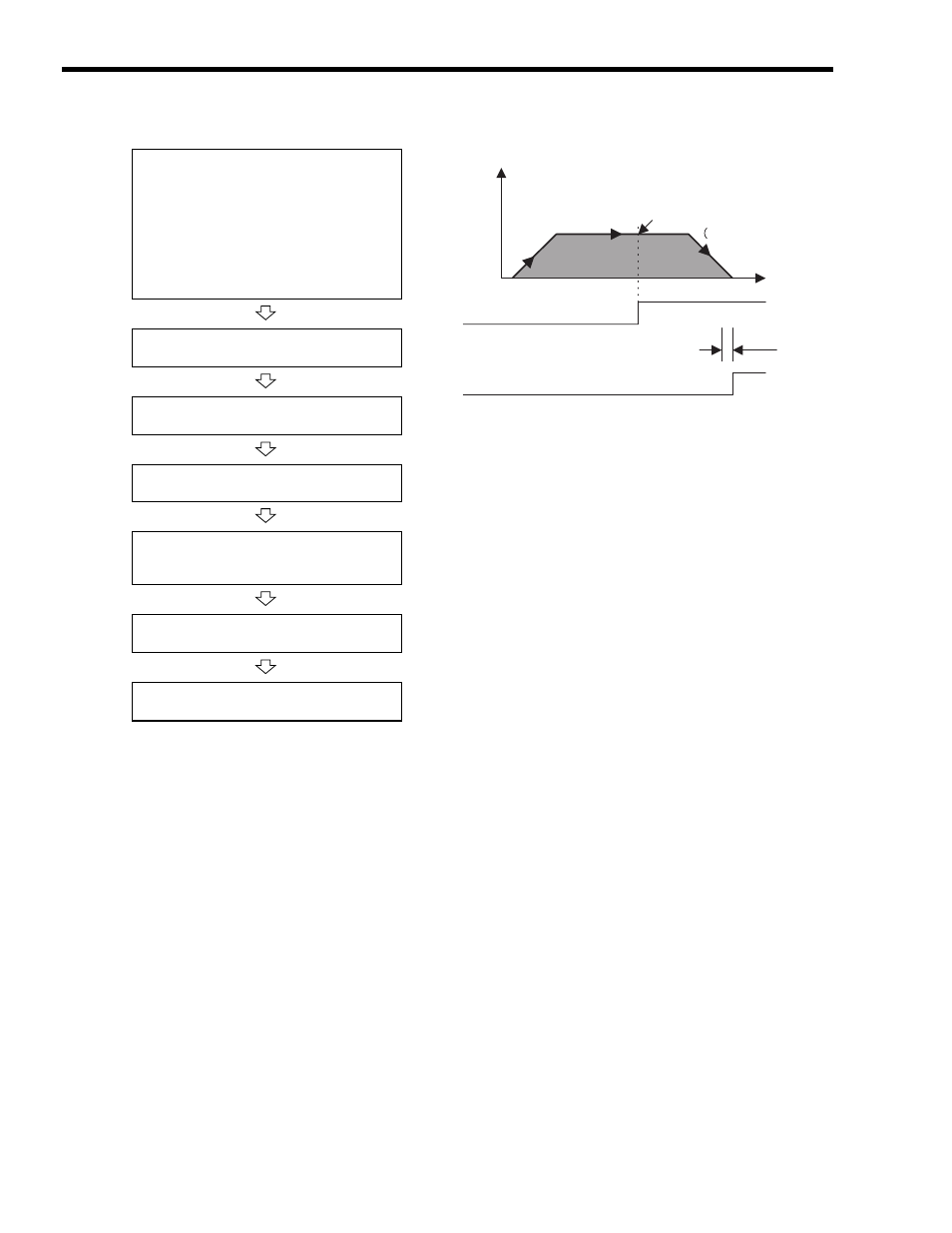
Execute the LATCH motion command.
• Set OW08 to 6.
Positioning starts.
• IW08 will be 6 during execution.
Change the Target Position (OL1C) every
high-speed scan.
When the latch signal turns ON, the current
position will be stored in the Register
(IL18).
Positioning Completed
• IB0C1 will turn ON.
Execute NOP motion command.
• Set OW08 to 0.
Position
Speed
(%)
Time (t)
0
Positioning Completed Range
POSCOMP
This position is stored.
IL
18)
Latch Signal