3 ) related parameters – Yaskawa MP2200 Machine Controller User Manual
Page 341
5.2 Motion Command Details
5-111
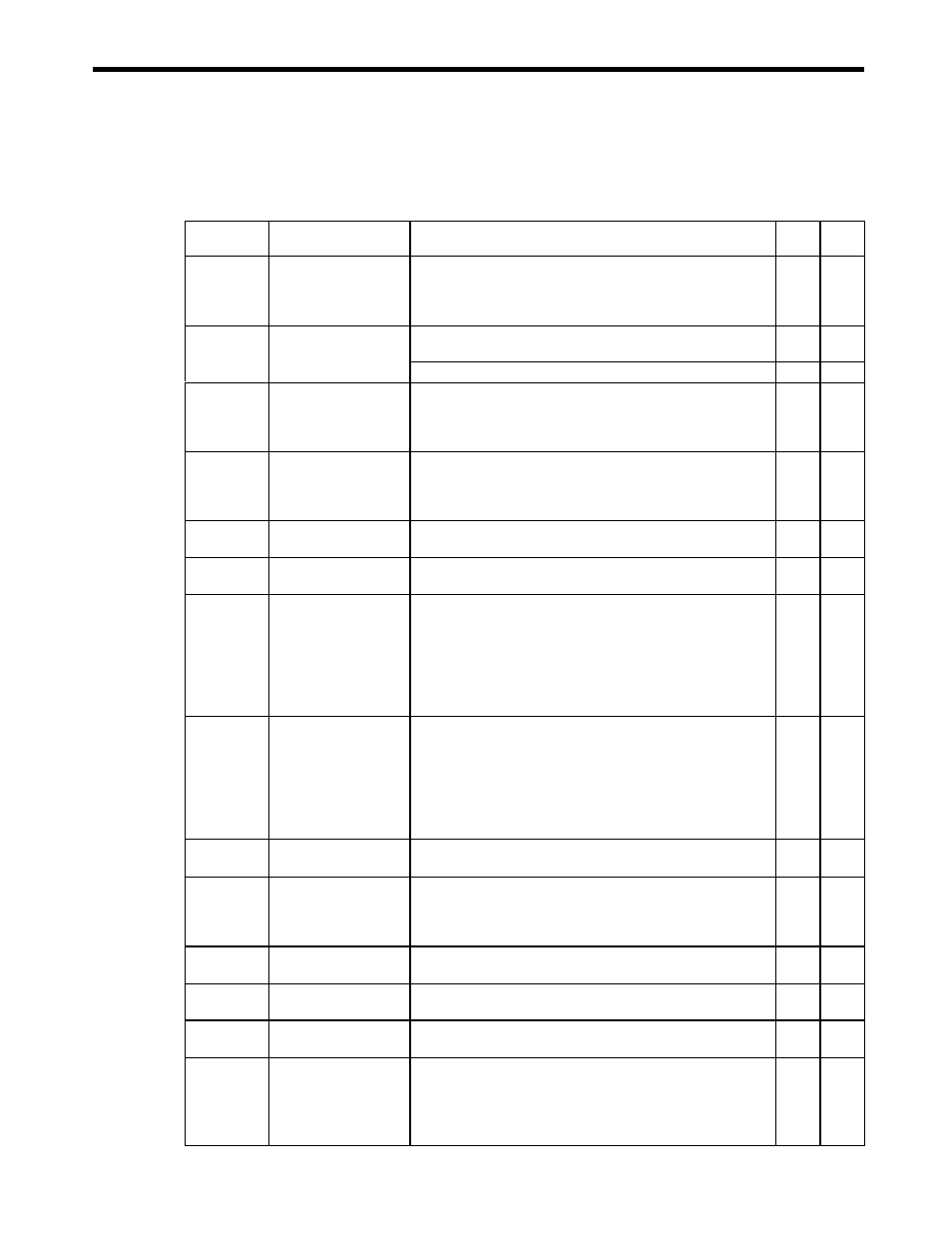
( 3 ) Related Parameters
[ a ] Setting Parameters
Parameter
Name
Setting
SVB-
01
SVA-
01
OB000
Servo ON
Turns the power to the Servomotor ON and OFF.
1: Power ON to Servomotor, 0: Power OFF to Servomotor
Turn ON the power before setting the Motion Command Code
(OW08) to 25.
Yes
Yes
OW03
Function 1
SVB-01: Sets the speed unit, acceleration/deceleration unit, and
filter type.
Yes
SVA-01: Sets the acceleration/deceleration unit.
Yes
OB051
Disable Phase
Reference Generation
Disables/enables phase reference generation processing when
executing phase reference commands. Enable this processing
when an electronic shaft is being used, and disable it when an
electronic cam is being used.
Yes
OW05
Disable Phase
Reference Generation
Disables/enables adding a change in position equivalent to the
reference speed to the target position. This parameter enables
setting processing appropriate to an electronic shaft or electronic
cam.
Yes
OW08
Motion Command
Phase control operation is started when this parameter is set to
25.
Yes
Yes
OL10
Speed Reference
Set the speed reference. The setting can be changed during
operation. The unit depends on the setting of OW03.
Yes
Yes
OL16
Secondary Speed
Compensation
Set the speed feed forward amount for the Phase Reference
command (PHASE).
The setting unit for Speed Amends (setting parameter
OW31) is 0.01% (fixed).The unit for this parameter,
however, can be selected by the user.
When used at the same time as OW31, speed compensation
can be performed twice.
Yes
OL18
Speed Override
This parameter allows the moving speed to be changed without
changing the Speed Reference (OL10). Set the override
value as a percentage of the Speed Reference. This setting can be
changed during operation.
Setting range: 0 to 32767 (0% to 327.67%)
Setting unit: 1 = 0.01%
Example: Setting for 50% = 5000
Yes
OL1E
Positioning
Completed Width
Sets the range in which the Positioning Completed bit
(IB0C1) will be ON.
Yes
OL20
Positioning
Completed Width 2
Sets the range in which the Position Proximity bit (IB0C3)
will be ON. The Position Proximity bit will be ON when the
absolute value of the difference between the reference position
and the feedback position is less than the value set here.
Yes
OL28
Phase
Compensation
Set the number of bias pulses for phase compensation in pulses. Yes
Yes
OW31
Speed Amends
Set the speed feed forward gain as a percentage of the rated
speed.
Yes
OL38
Linear Deceleration
Time
Set the rate of deceleration or deceleration time constant for
positioning.
Yes
OW3A
S-Curve
Acceleration Time
Set the acceleration/deceleration filter time constant.
Exponential acceleration/deceleration or a moving average filter
can be selected in OW03.
Change the setting only after pulse distribution has been
completed for the command (IB0C0 is ON).
Yes