Yaskawa MP2200 Machine Controller User Manual
Page 431
8.2 Motion Parameters
8-15
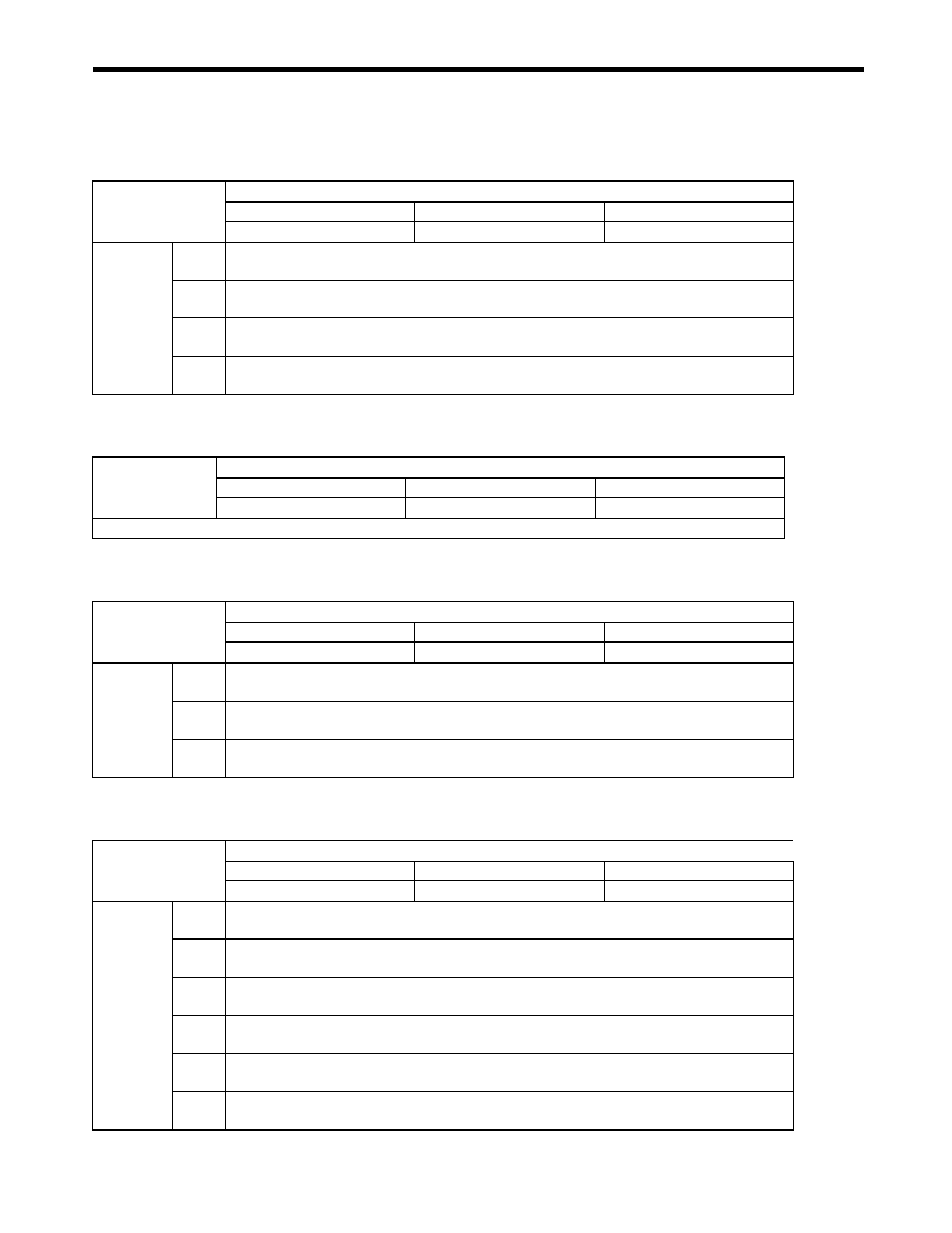
[ f ] Motion Command Status
[ g ] Motion Subcommand Response Code
[ h ] Motion Subcommand Status
[ i ] Position Management Status
IW09
Servo Module Command Status
Range
Unit
−
−
IW09
Bit 0
Command Executing (BUSY)
OFF: READY (completed), ON: BUSY (processing)
Bit 1
Command Hold Completed (HOLDL)
OFF: Command hold processing not completed, ON: Command hold processing completed
Bit 3
Command Error Occurrence (FAIL)
OFF: Normal completion, ON: Abnormal completion
Bit 8
Command Execution Completed (COMPLETE)
OFF: Normal execution not completed, ON: Normal execution completed
IW0A
Motion Subcommand Response Code
Range
Unit
0 to 65535
−
Stores the motion subcommand code that is being executed.
IW0B
Motion Subcommand Status
Range
Unit
−
−
IW0B
Bit 0
Command Executing (BUSY)
OFF: READY (completed), ON: BUSY (processing)
Bit 3
Command Error Occurrence (FAIL)
OFF: Normal completion, ON: Abnormal completion
Bit 8
Command Execution Completed (COMPLETE)
OFF: Normal execution not completed, ON: Normal execution completed
IW0C
Position Management Status
Range
Unit
−
−
IW0C
Bit 0
Distribution Completed (DEN)
OFF: Distributing pulses, ON: Distribution completed
Bit 1
Positioning Completed (POSCOMP)
OFF: Outside Positioning Completed Width, ON: In Positioning Completed Width
Bit 3
Position Proximity (NEAR)
OFF: Outside position proximity range, ON: In position proximity range
Bit 4
Zero Point Position (ZERO)
OFF: Outside zero point position range, ON: In zero point position range
Bit 5
Zero Point Return (Setting) Completed (ZRNC)
OFF: Zero point return (setting) not completed, ON: Zero point return (setting) completed
Bit 9
POSMAX Turn Number Presetting Completed (TPRSE)
OFF: Preset not completed, ON: Preset completed