B ] σ servopack – Yaskawa MP2200 Machine Controller User Manual
Page 480
9 Utility Functions
9.2.3 Parameter Settings
9-16
[ b ]
Σ SERVOPACK
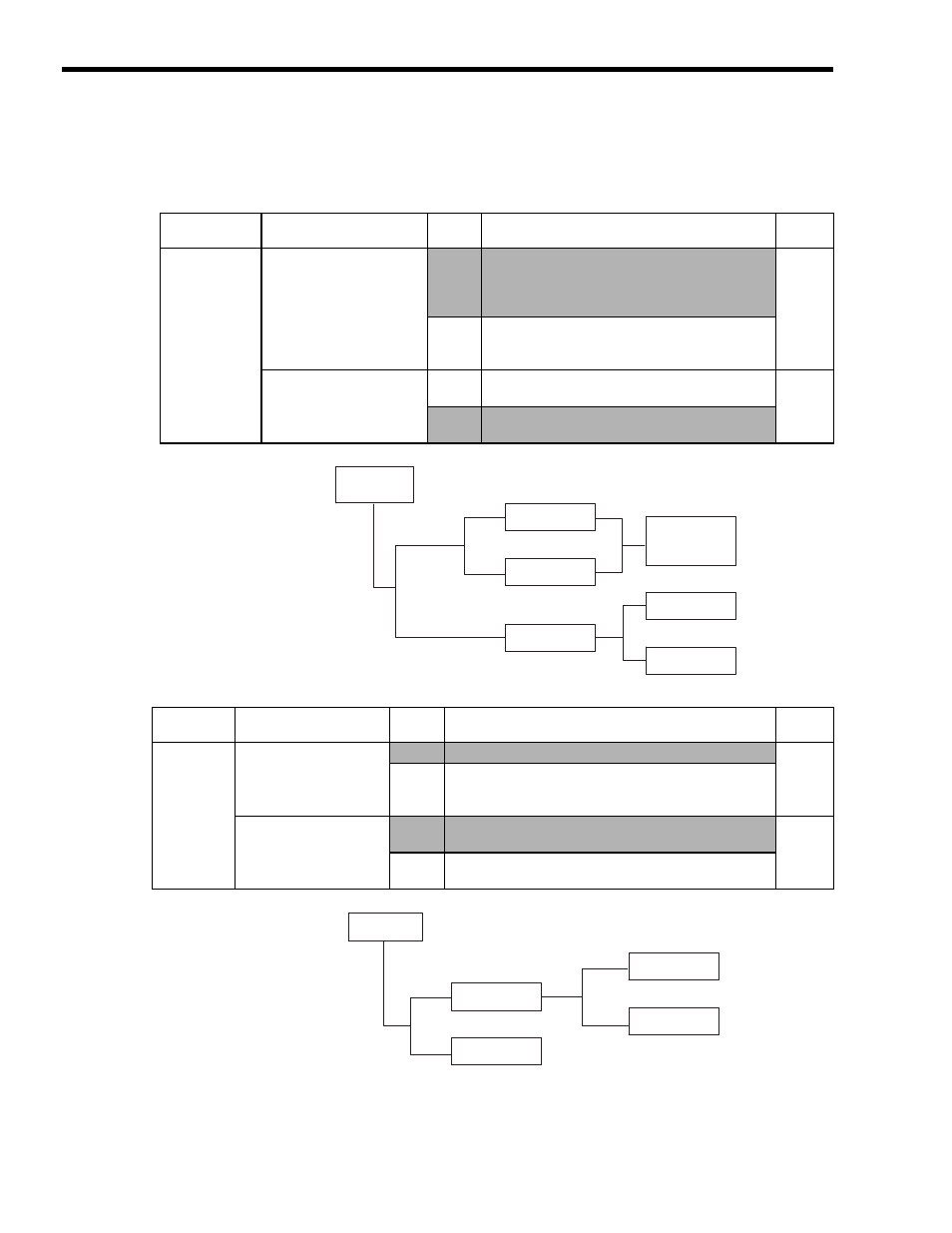
Select the stopping method and processing after stopping when an overtravel signal is input during
motor running.
Select the stopping method and processing after stopping when the Servo turns OFF.
Parameter
Name
Set
Value
Meaning
Default
Cn-01
Bit 8: Selection of stopping
method for overtravel
0
Uses the same stopping method as for Servo OFF.
Stops the motor according to CN-01 bit 6 setting
(dynamic brake or coasting) when overtravel is
detected.
0
1
Decelerates the motor to a stop by applying the
torque specified in Cn-06 (EMGTRQ Emergency
Stop Torque) when overtravel is detected.
Bit 9: Selection of
processing after stopping for
overtravel
0
Decelerates the motor to a stop and then turns OFF
the Servo.
0
1
Decelerates the motor to a stop and then sets it in the
zero-clamp mode.
Cn-01
Bit 8 = 0
Bit 6 = 0
Bit 9 = 0
Bit 9 = 1
Bit 6 = 1
Bit 8 = 1
Dynamic
brake stop
Coast to a stop
Deceleration
stop
Dynamic
brake released
(Servo OFF)
Stopping method
After stopping
Overtravel
Zero-clamp
Servo OFF
Parameter
Name
Set
Value
Meaning
Default
Cn-01
Bit 6: Selection of
stopping method for motor
when Servo turns OFF
0
Stops the motor by applying dynamic brake (DB).
0
1
Makes the motor coast to a stop.
Current is not supplied to the motor and the machine stops
due to friction.
Bit 7: Selection of
processing after stopping
for overtravel
0
Stops the motor by applying dynamic brake (DB) and then
releases the DB.
0
1
Stops the motor by applying dynamic brake (DB) and then
holds the DB.
Bit 6 = 0
Bit 7 = 0
Bit 7 = 1
Bit 6 = 1
Dynamic
brake stop
Coast to a stop
After stopping
Servo OFF
Stopping method
Dynamic brake
released
Dynamic
brake held