2 ) motion setting parameters – Yaskawa MP2200 Machine Controller User Manual
Page 426
8 SVR Virtual Motion Module
8.2.2 Motion Parameter Settings
8-10
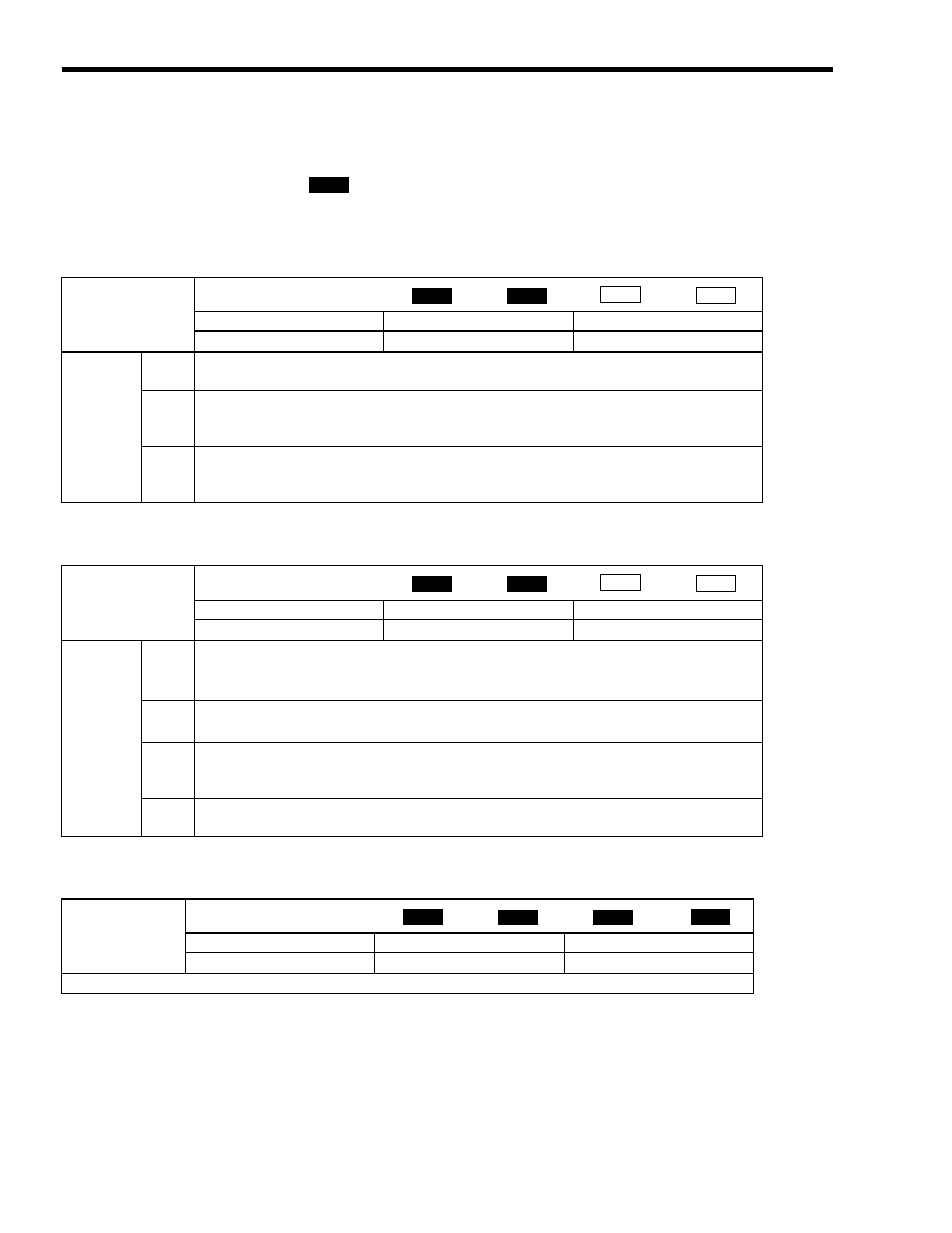
( 2 ) Motion Setting Parameters
(
Note)
: The labels shown in reverse type indicate that the parameter is enabled
during the corresponding control mode (position control shown here).
[ a ] RUN Commands
[ b ] Function 1
[ c ] Motion Command
Position
OW00
Run Commands
Setting Range
Setting Unit
Default Value
−
−
0000H
OW00
Bit 0
Servo ON
0: Servo OFF (default), 1: Servo ON
Bit 6
POSMAX Preset
0: POSMAX Preset OFF (default)
1: POSMAX Preset ON
Bit F
Clear Alarm
This setting is valid when the Motion Command (motion setting parameter OW08) is 0 (NOP).
0: Clear alarm OFF (default), 1: Clear alarm ON
Position
Phase
Speed
Torque
OW03
Function 1
Setting Range
Setting Unit
Default Value
−
−
0011H
OW03
Bit 0 to
Bit 3
Speed Units
0: Reference units/s, 1: 10
n
reference units/min (default)
2: 0.01%, 3: 0.0001%
Bit 4 to
Bit 7
Acceleration/Deceleration Units
0: Reference units/s
2
, 1: ms (default)
Bit 8 to
Bit B
Filter Type
0: No filter (default), 1: Exponential acceleration/deceleration filter
2: Moving average filter
Bit C to
Bit F
Torque Unit Selection
0: 0.01% (default), 1: 0.0001%
Position
Phase
Speed
Torque
OW08
Motion Command
Setting Range
Setting Unit
Default Value
0 to 26
−
0
Set motion commands.
Position
Phase
Speed
Torque