5 ) function 3 ( 6 ) motion command – Yaskawa MP2200 Machine Controller User Manual
Page 191
4.4 SVA-01 Module Parameter Details
4-71
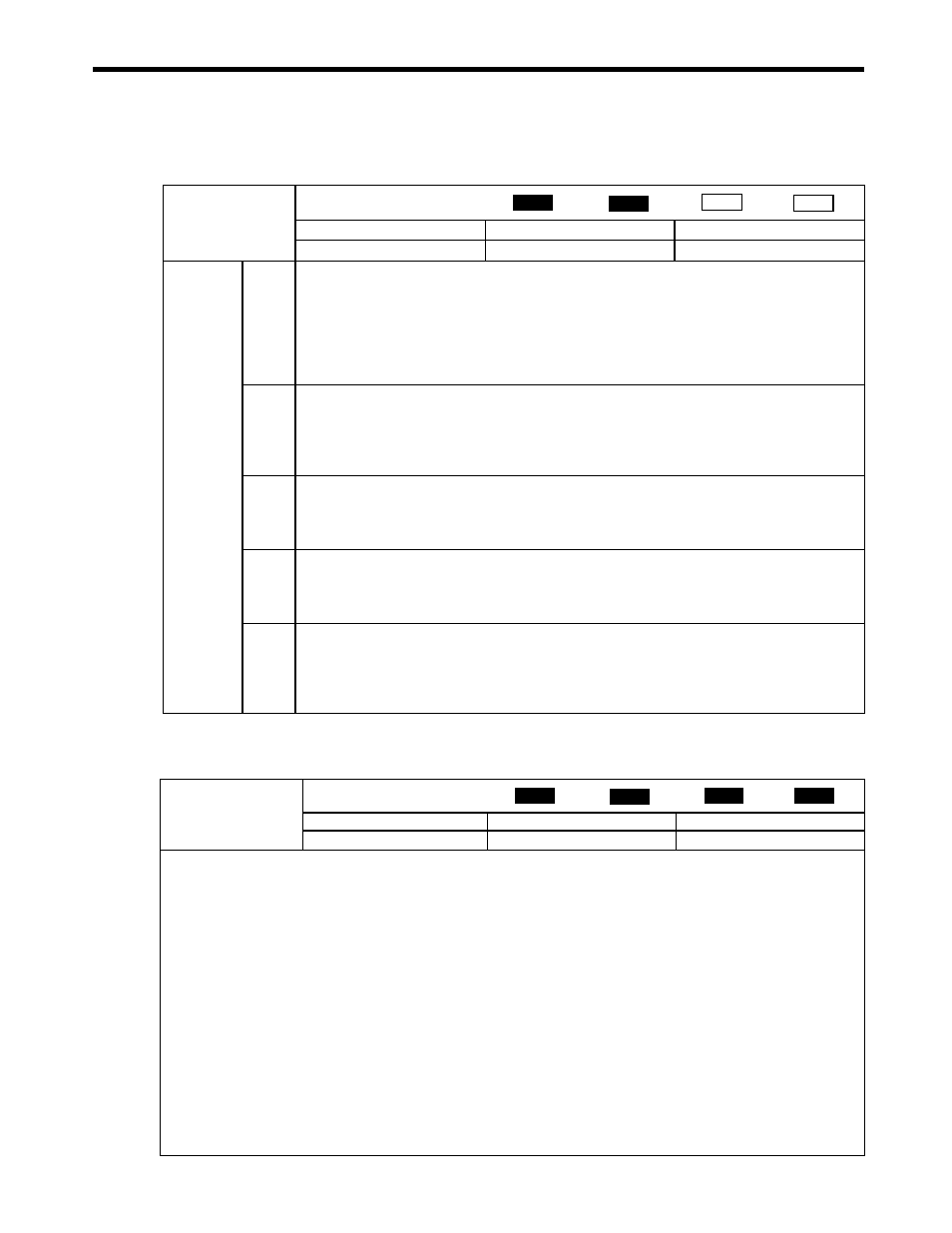
( 5 ) Function 3
( 6 ) Motion Command
OW05
Function 3
Setting Range
Setting Unit
Default Value
Bit Setting
−
0000 Hex
OW05
Bit 1
Disable Phase Reference Generation
Set whether to disable or enable phase reference generation processing when executing phase reference
commands.
Enable this processing when an electronic shaft is being used. Disable the processing when an
electronic cam is being used.
0: Enabled (default)
1: Disabled
Bit 8
Deceleration Limit Switch Signal for Zero Point Return
When the Deceleration Limit Switch Signal parameter is set to 0 (fixed parameter 21, bit 0 = 0), this bit
is used to input the deceleration limit switch signal for Zero Point Return (DEC1).
0: OFF (default)
1: ON
Bit 9
Reverse Limit Signal for Zero Point Return
This bit is used to input the reverse limit signal for Zero Point Return.
0: OFF (default)
1: ON
Bit A
Forward Limit Signal for Zero Point Return
This bit is used to input the forward limit signal for Zero Point Return.
0: OFF (default)
1: ON
Bit B
INPUT Signal for Zero Point Return
This bit functions as the INPUT signal when the INPUT & C pulse method or INPUT Only method is
being used for the Zero Point Return operation.
0: INPUT signal OFF (default)
1: INPUT signal ON
Position
Phase
Speed
Torque
OW08
Motion Command
Setting Range
Setting Unit
Default Value
0 to 25
−
0
Set motion command.
0: NOP
No command
1: POSING
Positioning
2: EX_POSING
External Positioning
3: ZRET
Zero Point Return
4: INTERPOLATE
Interpolation
5: ENDOF_
INTERPOLATE
Used by the system.
6: LATCH
Latch
7: FEED
JOG Operation
8: STEP
STEP Operation
9: ZSET
Zero Point Setting
23: VELO
Speed Reference
24: TRQ
Torque Reference
25: PHASE
Phase Reference
Refer to Chapter 5 Motion Commands for details.
Position
Phase
Speed
Torque