Yaskawa MP2200 Machine Controller User Manual
Page 211
4.4 SVA-01 Module Parameter Details
4-91
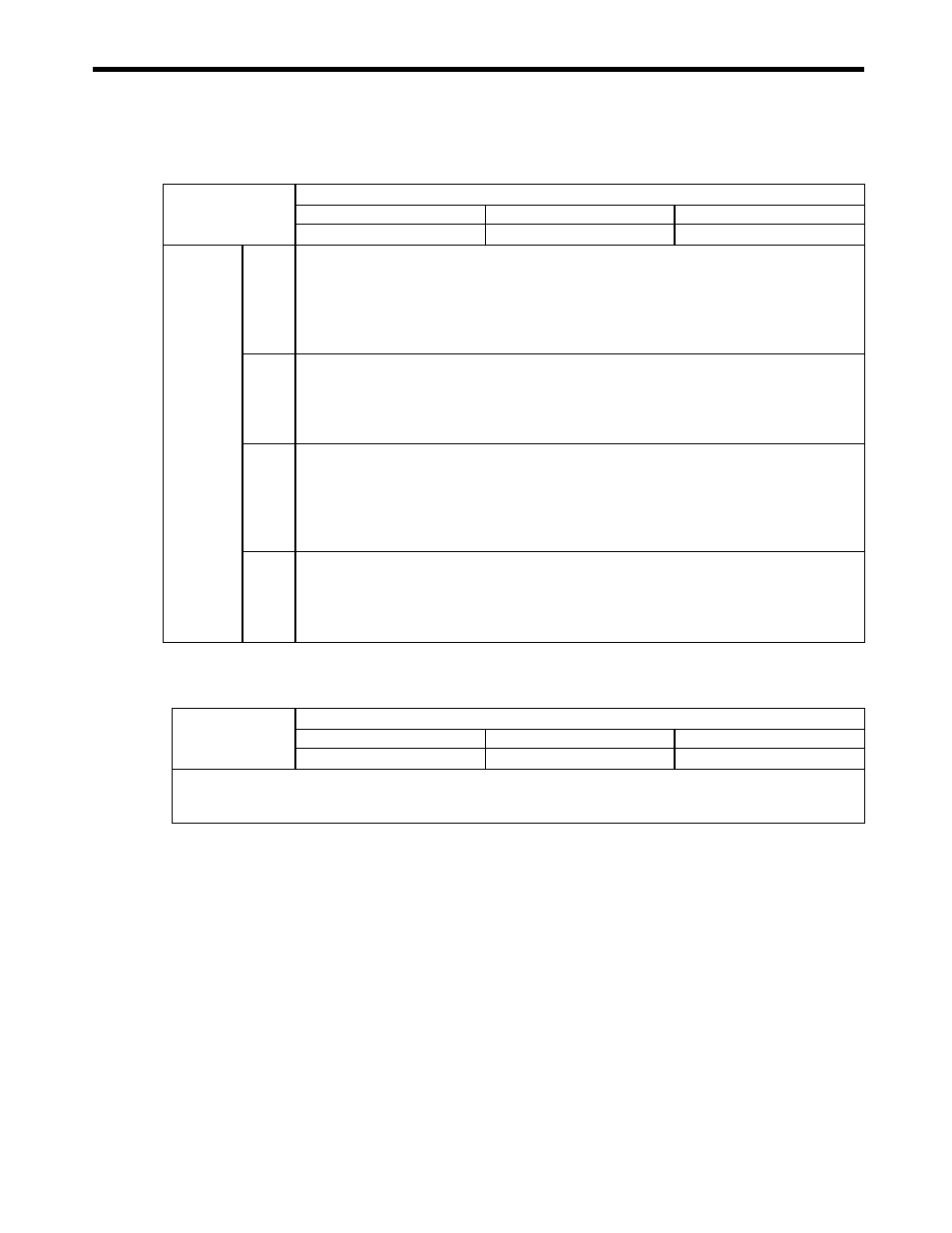
( 6 ) Motion Command Status
( 7 ) Motion Subcommand Response Code
IW09
Motion Command Status
Range
Unit
−
−
IW09
Bit 0
Command Executing (BUSY) Flag
This bit indicates the motion command's execution status. Refer to Chapter 5 Motion Commands for
details on command timing charts.
OFF: READY (completed)
ON: BUSY (processing)
This bit turns ON during execution of commands that have completions or during abort processing.
Bit 1
Command Hold Completed (HOLDL)
This bit turns ON when command hold processing has been completed. Refer to Chapter 5 Motion
Commands for details on command timing charts.
OFF: Command hold processing not completed
ON: Command hold completed
Bit 3
Command Error Occurrence (FAIL)
This bit turns ON if motion command processing was not completed normally.
If motion command execution ends in an error, moving axes will be stopped. Refer to Chapter 5
Motion Commands for details on command timing charts.
OFF: Normal completion
ON: Abnormal completion
Bit 8
Command Execution Completed (COMPLETE)
This bit turns ON when motion command processing was completed normally. Refer to Chapter 5
Motion Commands for details on command timing charts.
OFF: Normal execution not completed
ON: Normal execution completed
IW0A
Motion Subcommand Response Code
Range
Unit
0 to 5
−
Stores the code of the motion subcommand that is being executed.
This is the motion subcommand code that is currently being executed, so it is the same as the Motion Subcommand (setting
parameter OW0A).