Yaskawa MP2200 Machine Controller User Manual
Page 132
4 Motion Parameters
4.2.2 Setting Parameter List
4-12
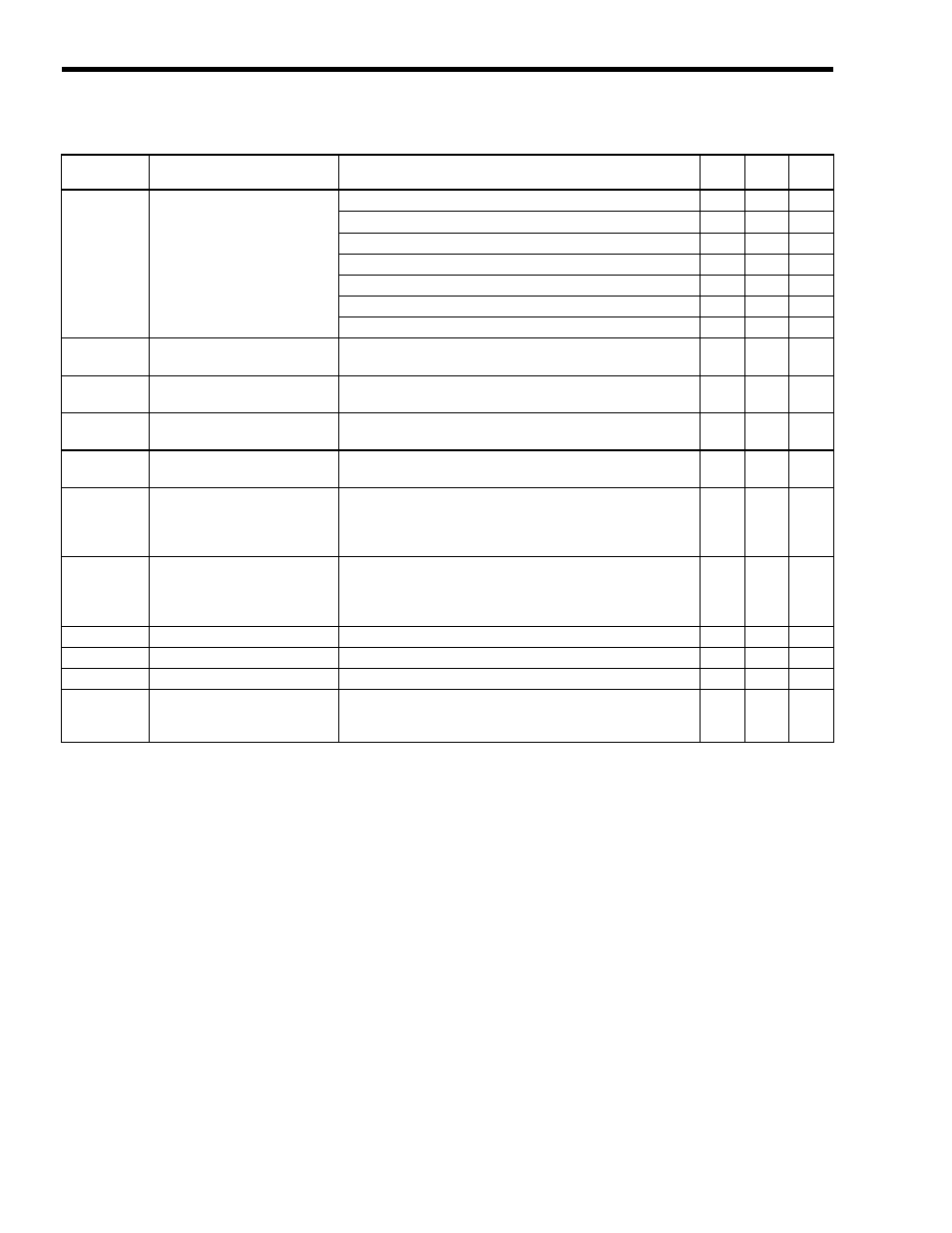
OW5D
General-purpose DO
Bit 0: General-purpose DO_0 (0: OFF/1: ON)
Yes
Bit 1: General-purpose DO_1 (0: OFF/1: ON)
Yes
Bit 2: General-purpose DO_2 (0: OFF/1: ON)
Yes
Bit 3: General-purpose DO_3 (0: OFF/1: ON)
Yes
Bit 4: General-purpose DO_4 (0: OFF/1: ON)
Yes
Bit 5: General-purpose DO_5 (0: OFF/1: ON)
Yes
Bits 6 to F: Reserved
OL5E
Absolute Position at Power
OFF (Low Value)
1 = 1 pulse
Yes
Yes
OL60
Absolute Position at Power
OFF (High Value)
1 = 1 pulse
Yes
Yes
OL62
Modularized Position at Power
OFF (Low Value)
1 = 1 pulse
Yes
Yes
OL64
Modularized Position at Power
OFF (High Value)
1 = 1 pulse
Yes
Yes
OL66
Monitor Data Command
0: Disable
1: Read
2: Write
3: Read analog adjustment data
Yes
OL68
Write Data Type
0: Disable
1: Byte (8 Bits)
2: Word (16 Bits)
3: Long (32 Bits)
Yes
OL6A
Monitor Address
Read/write address
Yes
OL6C
Write Data
Write data
Yes
OL6E
Stop Distance
Reserved
OW70
to
OW7F
Command Buffer for
Transparent Command Mode
This area is used for command data when MECHATROLINK
servo commands are specified directly.
Yes
(cont’d)
Register No.
Name
Description
SVB
-01
SVA
-01
SVR