Yaskawa MP2200 Machine Controller User Manual
Page 403
7.3 Using an Absolute Encoder
7-19
To set the present position of the machine coordinate system to 0 when the Zero Point
Setting (ZSET) motion command is executed
Set OL48 to 0.
Calculating the Reset Value for the Number of Turns
• Reset Value When the Reference Unit is Pulses
Reset value = Infinite length axis reset position / Number of pulses per motor rotation
• Reset Value for All Other Reference Units
Reset value = (Infinite length axis reset position
× Servomotor gear ratio) / (Moving amount per machine
rotation
× Machine gear ratio)
[ b ] Parameters Used for a Simple Absolute Infinite Axis
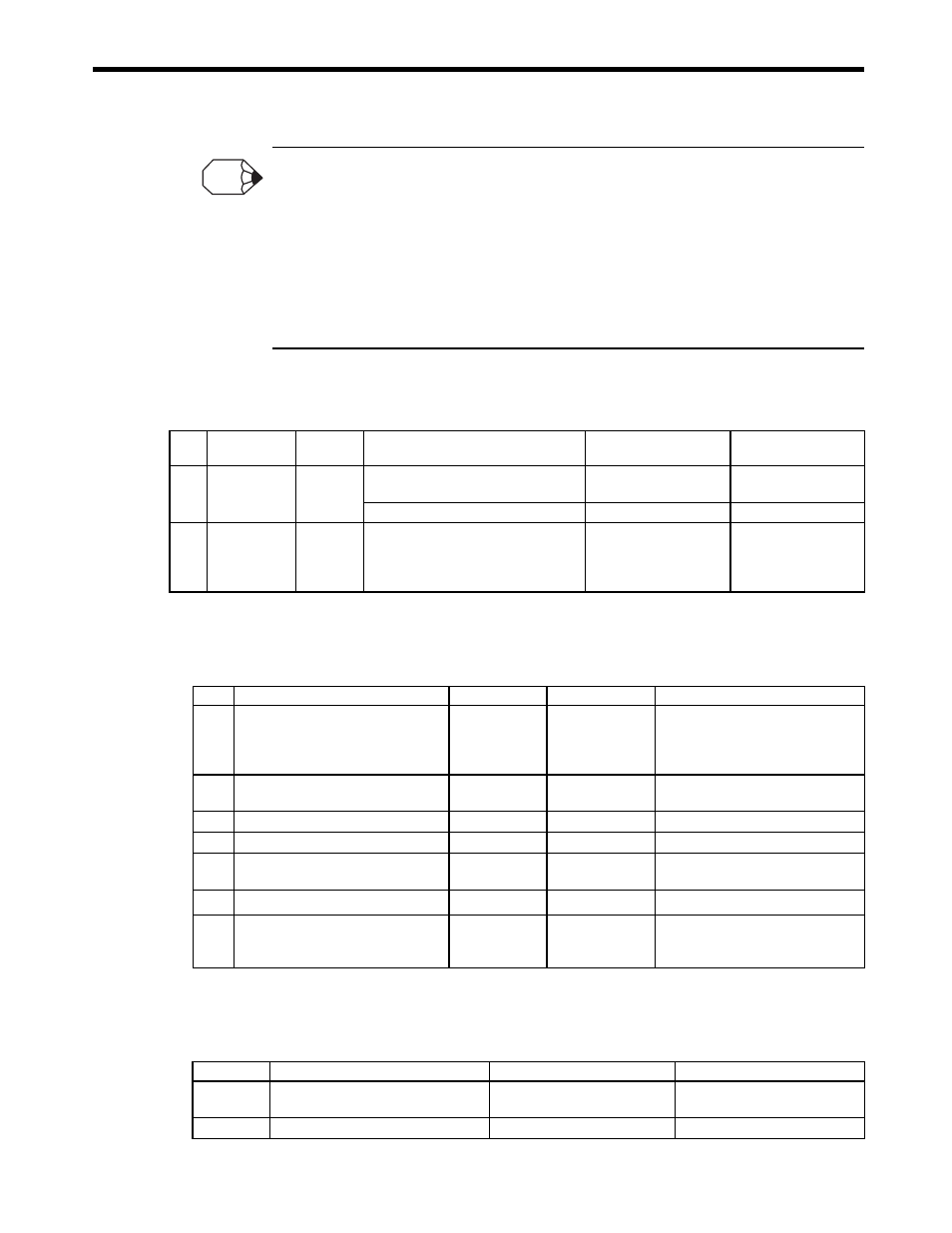
The fixed parameters listed in the following table must be set to use a simple absolute infinite axis.
The Simple ABS Infinite Axis bit will not be valid if both an infinite length axis and an absolute
encoder are not set.
The following parameters set the conditions for the number of turns for resetting the encoder.
A fixed parameter error will occur and information will be provided in the following monitoring
parameters if a simple absolute infinite axis is selected and the combination of the above fixed
parameters do not satisfy the equation given on the previous page, i.e., (Maximum number of
absolute encoder turns +1) / Reset number of turns = An integer (i.e., remainder = 0).
INFO
No.
Name
Setting
Range
Meaning
Details Setting
1
Function 1
Bit setting
Bit 0: Axis Type
0: Finite length axis
1: Infinite length axis
1: Infinite length axis
Bit 9: Simple ABS Infinite Axis
0: Disable, 1: Enable
1: Enable
30
Encoder
Type
0 to 3
0: Incremental encoder
1: Absolute encoder
2: Absolute encoder
(used as incremental encoder)
1: Absolute encoder
No.
Name
Setting Range
Meaning
Details
4
Command Unit
0 to 3
0: pulse
1: mm
2: deg
3: inch
The electronic gear is not relevant if
the unit is pulses.
6
Command Unit per Revolution
1 to 2
31
−1
1 = 1 reference
unit
8
Gear Ratio [MOTOR]
1 to 65535
1 = 1 rotation
9
Gear Ratio [LOAD]
1 to 65535
1 = 1 rotation
10
Maximum Value of Rotary Counter
1 to 2
31
−1
1 = 1 reference
unit
36
Encoder Resolution
1 to 2
31
−1
1 = 1 pulse/rev
This setting must match the encoder.
38
Max. Revolution of Absolute
Encoder
0 to 2
31
−1
1 = 1 rotation
This setting must match the setting in
the SERVOPACK.
Pn205 must be 65534 or less.
Register Name
Meaning
Details
IW01
Over Range Parameter Number
Stores the parameter number
with a setting error.
Fixed parameter:
1000 + fixed parameter number
IL02
Warning
Bit 2: Fixed Parameter Error
0: OFF, 1: ON