Yaskawa MP2200 Machine Controller User Manual
Page 113
3.2 SVA-01 Module Setup
3-41
■
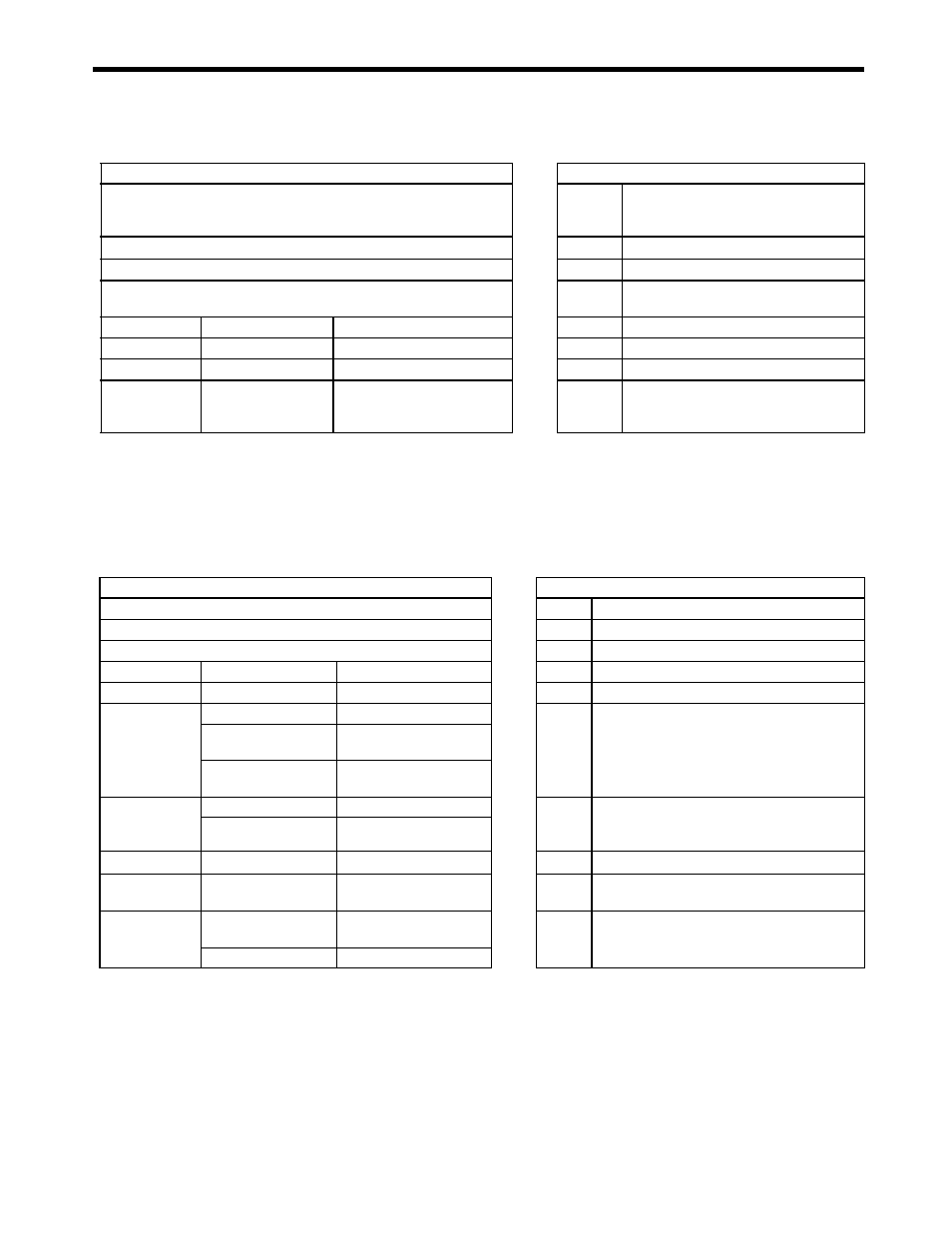
With a Linear Motor Connected
* When converting the unit of Pn280 from
µm to UNIT, multiply by 10
n
and set the results in
fixed parameter No. 6 so that fractions do not result. In the same way for Pn281, multiply by
10
n
and set the results in fixed parameter No. 36.
[ d ] SGDS
■
With a Rotary Motor Connected
SERVOPACK and Motor Specifications
SVA-01 Module Fixed Parameter Settings
Pn280 (Linear scale pitch) [
µm] converted to UNIT.*
→
No. 6
Command Units per Revolution (Rotary
Motor) or Linear Scale Pitch (Linear
Motor)
Pn300 (Speed reference input gain)
× 0.01 × 1000
→
No. 23
D/A Output Voltage at 100% Speed
Pn400 (Torque reference input gain)
× 0.1 × 1000
→
No. 24
D/A Output Voltage at 100% Torque
1000 (fixed value)
→
No. 26
A/D Input Voltage at 100% Torque
Monitor
Servo type
Σ-II (including Σ-III) 1 (fixed value)
→
No. 28
Servo Drive Selection
Motor type
Linear
1 (fixed value)
→
No. 29
Motor Type Selection
Rated speed
Linear
Rated speed [0.1 m/s]
→
No. 34
Rated Speed [0.1 m/s]
Encoder
resolution
Linear
Pn281 (PG dividing ratio)
÷ 4
[pulses/scale pitch] *
→
No. 36
Encoder Resolution (before
Multiplication) or PG Dividing Ratio per
Scale Pitch (before Multiplication)
SERVOPACK and Motor Specifications
SVA-01 Module Fixed Parameter Settings
Pn300 (Speed reference input gain)
× 0.01 × 1000
→
No. 23
D/A Output Voltage at 100% Speed
Pn400 (Torque reference input gain)
× 0.1 × 1000
→
No. 24
D/A Output Voltage at 100% Torque
1000 (fixed value)
→
No. 26
A/D Input Voltage at 100% Torque Monitor
Servo type
Σ-II (including Σ-III)
1 (fixed value)
→
No. 28
Servo Drive Selection
Motor type
Rotary
0 (fixed value)
→
No. 29
Motor Type Selection
Encoder
INC
0 (fixed value)
→
No. 30
Encoder Selection
For ABS,
Pn002.2 = 0 (ABS)
1 (fixed value)
or 2 (fixed value)
For ABS,
Pn002.2 = 1 (INC)
0 (fixed value)
Reverse
rotation
connection
Pn000.0 = 0 (Forward) 0 (fixed value)
→
No. 31
Rotational Direction of Absolute Encoder
Pn000.0 = 1 (Reverse) 1 (fixed value)
Rated speed
Rotary
Rated speed [min
−1
]
→
No. 34
Rated Speed
Encoder
resolution
Rotary
Pn212 (PG dividing pulse)
[pulse/rev]
→
No. 36
Encoder Resolution (before Multiplication) or
Serial Converter Resolution
Multiturn limit
Rotary
Pn205 (Multiturn limit
setting)
→
No. 38
Max. Revolutions of Absolute Encoder
DD motor
0 (fixed value)