5 write servopack parameter (prm_wr), 5 write servopack parameter (prm_wr) -120, 1 ) operating procedure ( 2 ) related parameters – Yaskawa MP2200 Machine Controller User Manual
Page 350
5 Motion Commands
5.3.5 Write SERVOPACK Parameter (PRM_WR)
5-120
5.3.5 Write SERVOPACK Parameter (PRM_WR)
The PRM_WR command writes the SERVOPACK parameter using the specified parameter number,
parameter size, and setting data.
The write destination is in the SERVOPACK's RAM.
This command will end with a Command Error End if it is executed with a communication method
other than MECHATROLINK-II (32 byte).
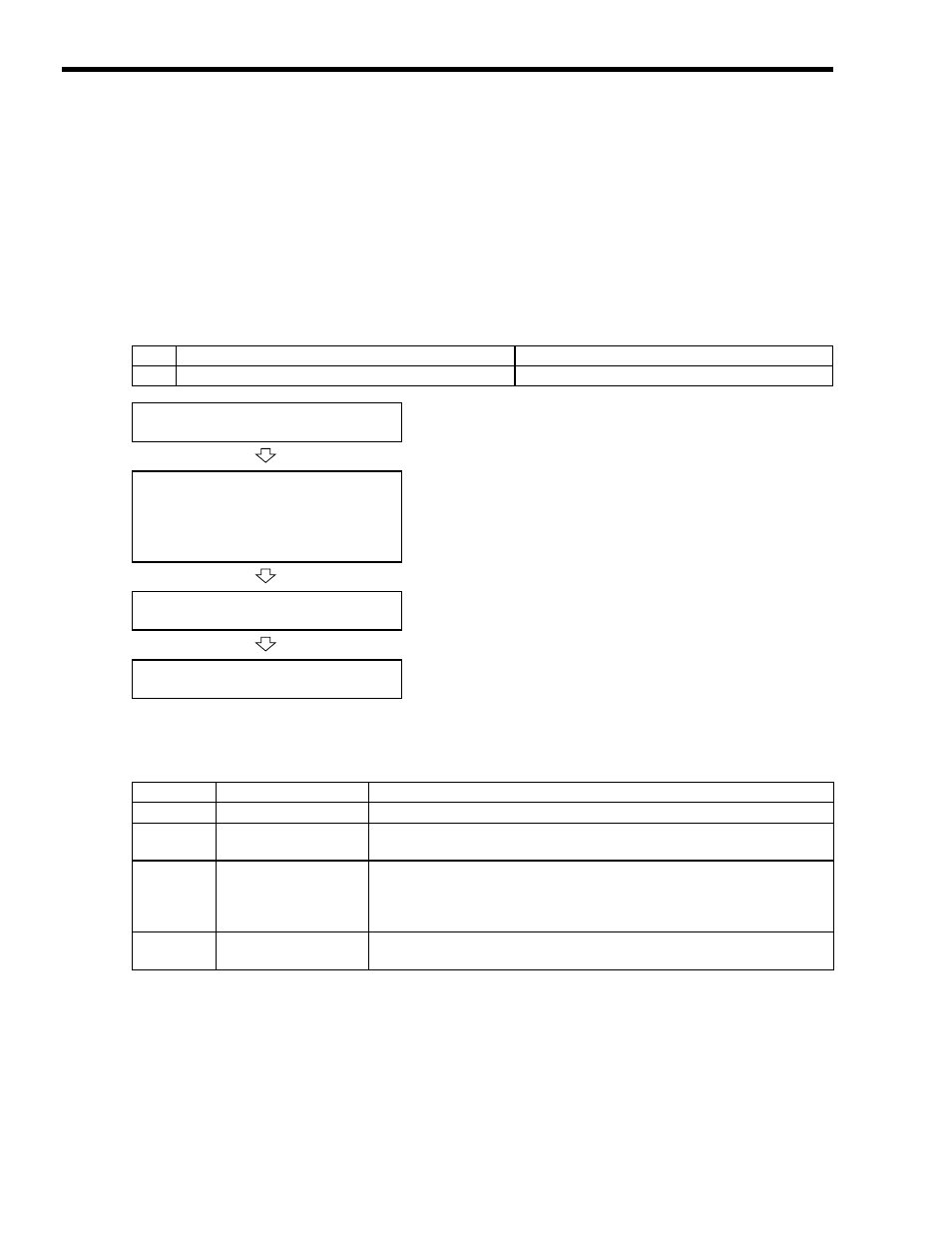
( 1 ) Operating Procedure
( 2 ) Related Parameters
[ a ] Setting Parameters
No.
Execution Conditions
Confirmation Method
1
Motion subcommand execution must be completed.
IW0A is 0 and IB0B0 is OFF.
Execute PRM_WR motion subcommand.
• Set OW0A to 2.
Writes the SERVOPACK parameter.
• IW0A will be 2 during command
execution.
• IB0B0 will be ON during command
processing.
Write completed.
• IW0A is 2 and IB0B0 is OFF.
Execute NOP motion command.
• Set OW0A to 0.
Parameter
Name
Setting Contents
OW0A
Motion Subcommand
The SERVOPACK parameter is written when this parameter is set to 2.
OW54
Auxiliary Servo User
Constant Number
Set the number of the SERVOPACK parameter to write.
OW55
Auxiliary Servo
Constant Number Size
Set the size of the SERVOPACK parameter to write.
Set the size in words.
(
Note) The SERVOPACK's user manual lists the size in bytes, so
those values must be converted to words.
OL57
Auxiliary Servo User
Constant
Set the set value for the SERVOPACK parameter to write.