2 motion setting parameter details, 2 motion setting parameter det, 2 motion setting parameter details -23 – Yaskawa MP2200 Machine Controller User Manual
Page 143: 1 ) run commands
4.3 SVB-01 Module Parameter Details
4-23
4.3.2 Motion Setting Parameter Details
The motion setting parameters are listed in the following tables.
(
Note)
: The labels shown in reverse type indicate that the parameter is enabled
during the corresponding control mode (position control shown here).
( 1 ) RUN Commands
Position
OW00
RUN Commands
Setting Range
Setting Unit
Default Value
−
−
0000H
OW00
Bit 0
Servo ON
Set whether or not to turn ON (excite) the SERVOPACK.
0: Servo OFF (default)
1: Servo ON
Bit 1
Machine Lock
During the machine lock mode, the Target Position (CPOS) (monitoring parameter IL10) will be
updated but no movement will occur on the axis. Changes to the machine lock mode are valid after all
pulses have been distributed. The machine lock mode cannot be changed during speed or torque
control.
0: Machine lock mode released (default)
1: Machine lock mode
Bit 4
Latch Request
Store the current position when the latch signal turns ON in the Machine Coordinate Latch Position
(LPOS) (monitoring parameter IL18).
When latch detection is completed, the Latch Completed bit will turn ON in the Position Management
Status (monitoring parameter IW0C, bit 2).
To perform latch detection again, change this bit from 0 to 1.
Set the latch signal to be used in Latch Input Signal Type of Function 2 (setting parameter OW04,
bits 0 to 3).
This function is achieved using the Servo command expansion area and can be executed only with the
MECHATROLINK-II, 32-byte Mode communication method.
Do not change this bit to 1 during execution of the motion commands for zero point return, external
positioning, or latching. Doing so may result in a warning at the SERVOPACK.
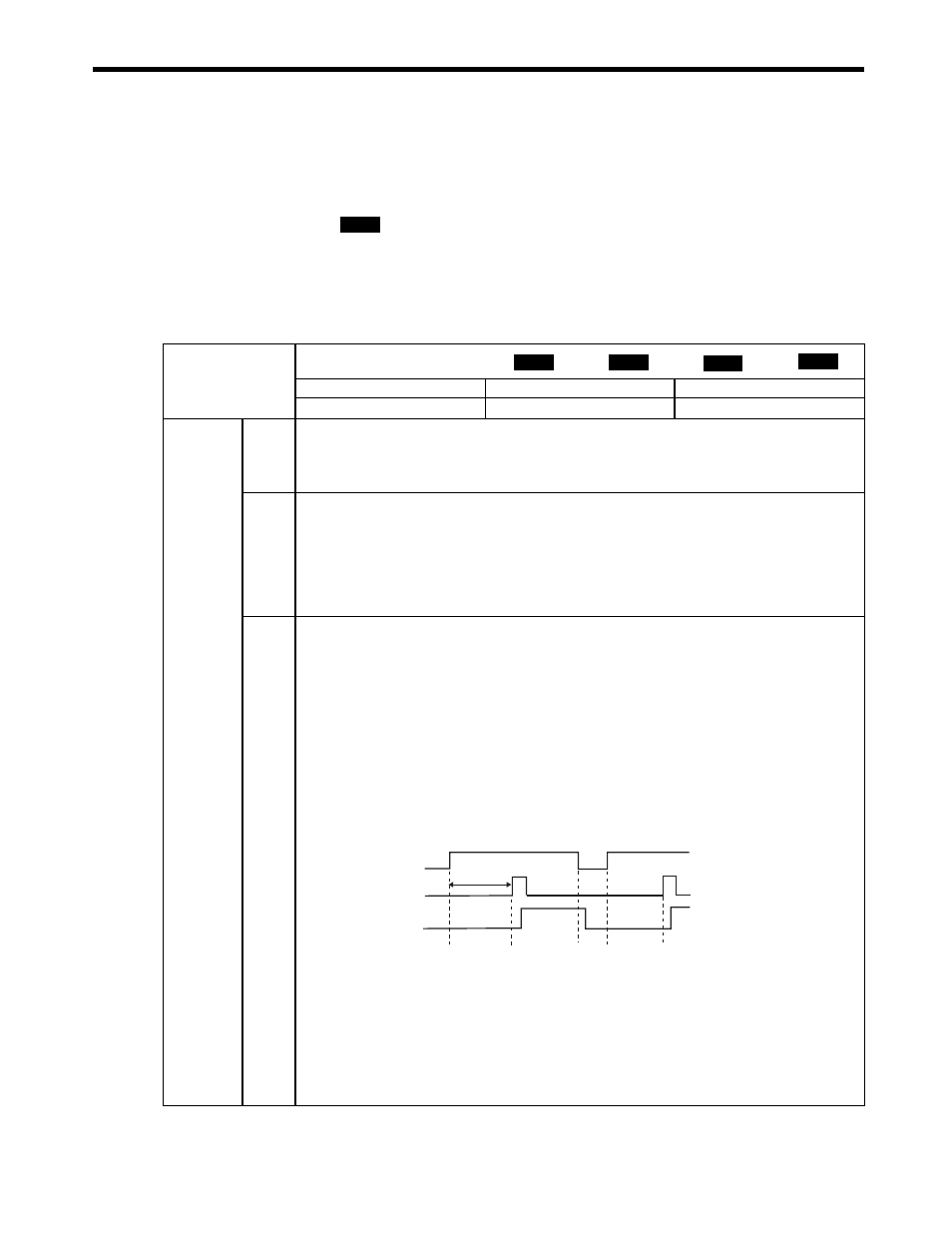
* T
≥
t
1
+ t
2
+ t
3
Where
T: Latch processing time
t
1
: Communication cycle
t
2
: Two scans
t
3
: SERVOPACK latch processing preparations time (
≤ 4 ms)
0: Latch request OFF (default)
1: Latch request ON
Position
Phase
Speed
Torque
OB
004
IB
0C2
∗
T
Latch signal