Yaskawa MP2200 Machine Controller User Manual
Page 511
10.1 Motion Errors
10-25
* Automatically reflected when the User Constants Self-Writing Function is enabled in the fixed
parameters and the setting for the S-curve Acceleration Time, Acceleration Time Constant, or
Deceleration Time Constant is changed at the same time that the move command is set.
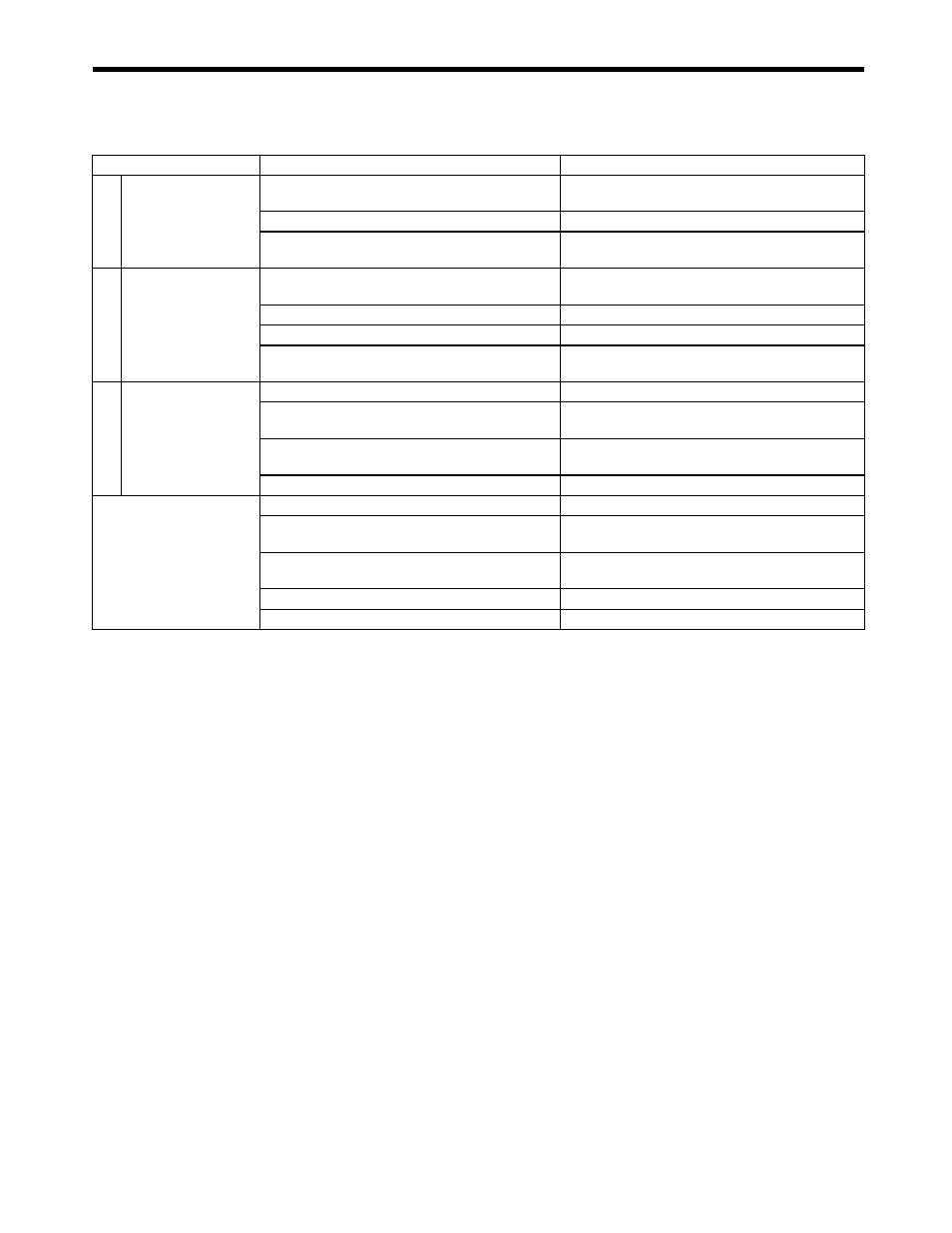
24
Torque Reference
(TRQ)
Command was sent while connected through
MECHATROLINK-I.
No alarm or warning
Alarm occurred.
−
Communications are not synchronized.
“Servo Driver Synchronization Communication Error”
alarm
25
Phase Reference
(PHASE)
The axis is an absolute infinite length axis and the
Zero Point Return (Setting) has not been completed.
“Zero Point Not Set” alarm
Servo OFF status
“Servo OFF” alarm
Alarm occurred.
−
Communication is not synchronized.
“Servo Driver Synchronization Communication Error”
alarm
26
Change Position
Integration Time
Constant (KIS)
Alarm occurred.
−
Communication is not synchronized.
“Servo Driver Synchronization Communication Error”
alarm
A Servo parameter write operation was not completed
within the required time.
“Servo Driver Command Timeout Error” alarm
An A.94 or A.95 warning occurred in the Servo.
“Servo Driver Error” warning
Other Commands
• Automatically reflected in
parameter when move
command starts.
Alarm occurred.
−
Communication is not synchronized.
“Servo Driver Synchronization Communication Error”
alarm
A Servo parameter write operation was not completed
within the required time.
“Servo Driver Command Timeout Error” alarm
An A.94 or A.95 warning occurred in the Servo.
“Servo Driver Error” warning
Pulse distribution was not completed (DEN = OFF).
No alarm or warning
(cont’d)
Motion Command Code
Cause of Command Error End Status
Simultaneously Occurring Warnings or Alarms