Yaskawa MP2200 Machine Controller User Manual
Page 22
xxii
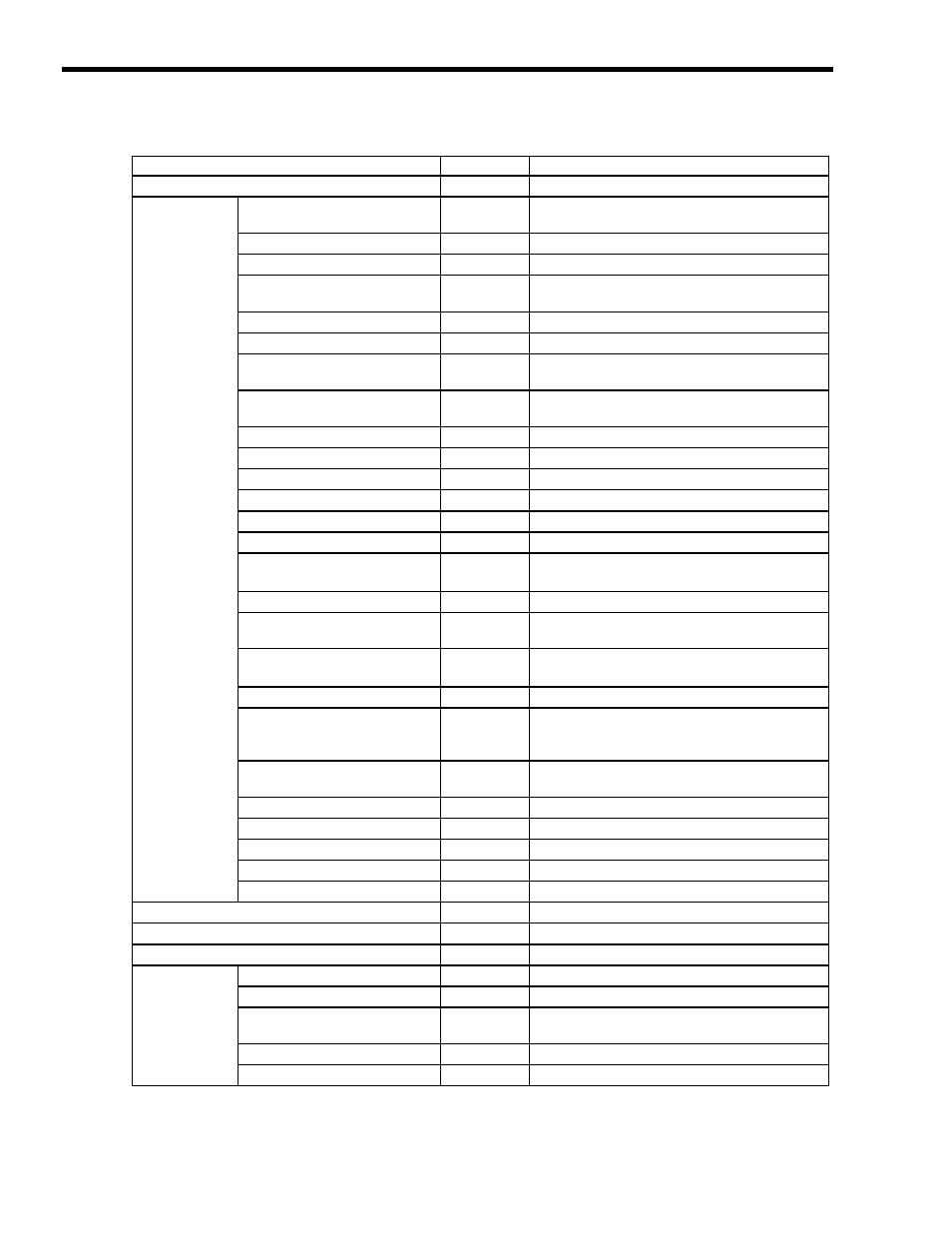
Position
-
Position
AbsDataRestore
OBxx007
Loads current position with ABS encoder position at
last power off.
AbsDataRestored
IBxx0C8
Absolute data has been restored (ABSLDE).
Actual
ILxx16
Actual (feedback) position (APOS)
Commanded
OLxx1C
Commanded position, incremental or absolute based
on MoveType
CommandedPerScan
ILxx1C
Commanded position per each scan
Error
ILxx1A
Position error (PERR)
ErrorLimit
OLxx22
The value (in user units) that triggers a position error
alarm or warning when exceeded
ErrorType
OBxx010
Sets whether position error will trigger an alarm(0) or
warning(1).
IncTarget
ILxx0E
Commanded position (TPOS)
IncTargetModularized
ILxx10
Modularized commanded position per scan (CPOS)
IncTargetModularized2
ILxx12
Commanded position per scan (MPOS)
InPosition
IBxx0C1
In position (POSCOMP)
InPosition2
IBxx0C3
Second in position (NEAR)
InPosition2N
IBxx2CB
Servo status NEAR
InPosition2Window
OLxx20
Position window that determines when InPosition2
will be set (when Actual=Commanded ± Window2)
InPositionN
IBxx2C7
Servo status PSET
InPositionTimeOut
OWxx26
The value (in milliseconds) that triggers a position
complete timeout alarm after the profilier is complete
InPositionWindow
OLxx1E
Position window that determines when InPosition will
be set (when Actual=Commanded ± Window)
MoveType
OBxx95
Selects positioning. 0=incremental 1=absolete
Offset
OLxx46
The offset distance that the motor will travel during
the external positioning command if the external
positioning signal is activated during the move
PhaseCompensation
OLxx28
Position units added to the commanded position in
phase control mode.
PhasePositionLoopEnable
OBxx051
Closes position loop with OLxx16.
ProfilerComplete
IBxx0C0
Profiler complete (DEN)
ProfilerCompleteN
IBxx2C8
Servo status DEN
Relative
OLxx44
Distance used in the step command
WorkCoordinateOffset
OLxx4A
Offset for interpolation commands
S_CurveTime
OWxx3A
Softens acceleration or deceleration.
ServoOn
OBxx000
Sets bit to energize servo.
ServoParameter
-
ServoParameter
GetNumber
IWxx36
Requested parameter number (Pn)
GetValue
ILxx38
Requested parameter value
SetNumber
OWxx50
The number of the amplifier parameter to be read or
set
SetSize
OWxx51
The size of the amplifier parameter data
SetValue
OLxx52
The value to be set for the amplifier parameter
(cont’d)
Variable Name
Register
Comments