Yaskawa MP2200 Machine Controller User Manual
Page 218
4 Motion Parameters
4.4.3 Motion Monitoring Parameter Details
4-98
( 15 ) Supplemental Information 2
( 16 ) Supplemental Information 3
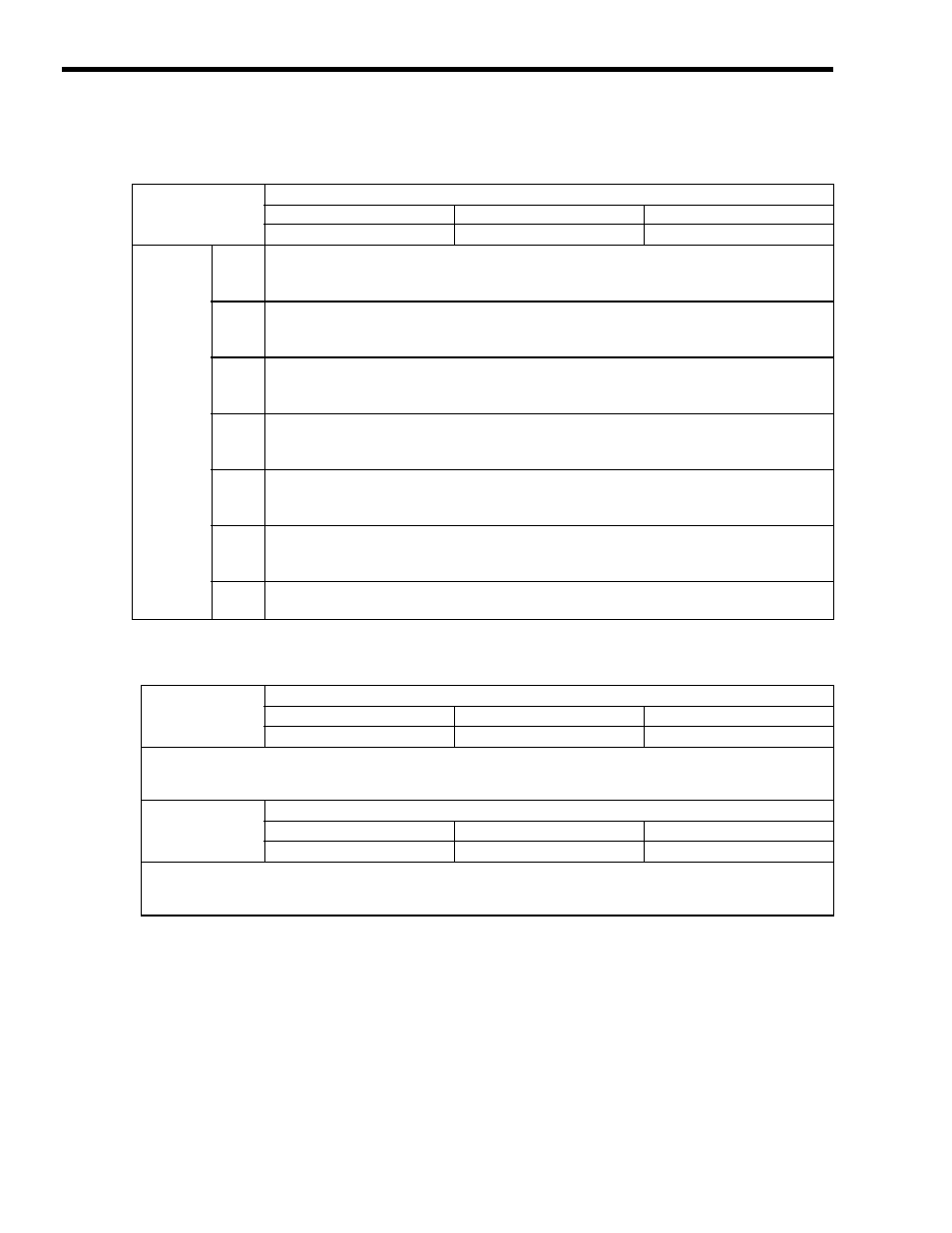
IW58
General-purpose Digital Input (DI) Monitor
Range
Unit
Bit Setting
−
IW58
Bit 0
General-purpose DI 0
This parameter can be used only in General-purpose I/O Mode.
Used by the system in normal Run Mode to store the Servo Alarm input.
Bit 1
General-purpose DI 1
This parameter can be used only in General-purpose I/O Mode.
Used by the system in normal Run Mode to store the Servo Ready input.
Bit 2
General-purpose DI 2
This parameter can be used only in General-purpose I/O Mode.
Used by the system in normal Run Mode to store the ZERO/HOME Limit Switch input.
Bit 3
General-purpose DI 3
This parameter can be used only in General-purpose I/O Mode.
Used by the system in normal Run Mode to store the Positive Overtravel input.
Bit 4
General-purpose DI 4
This parameter can be used only in General-purpose I/O Mode.
Used by the system in normal Run Mode to store the Negative Overtravel input.
Bit 5
General-purpose DI 5
This parameter can be used only in General-purpose I/O Mode.
Used by the system in normal Run Mode to store the EXT/DEC Signal input.
Bit 7
PG Disconnected Status
Stores the status of the PG Disconnected signal.
IL59
General-purpose AI Monitor 1
Range
Unit
−32768 to 32767
0.001 V
Stores a general-purpose analog input.
When a standard servo cable is being used, this parameter stores the servo's analog speed monitor value.
The effective signal range is
−9.9 to 9.9 V.
IL5A
General-purpose AI Monitor 2
Range
Unit
−32768 to 32767
0.001 V
Stores a general-purpose analog input.
When a standard servo cable is being used, this parameter stores the servo's torque monitor value.
The effective signal range is
−9.9 to 9.9 V.