3 ) restrictions for feedback pulse inputs – Yaskawa MP2200 Machine Controller User Manual
Page 114
3 Motion Module Setup
3.2.4 Servo Parameter Settings
3-42
■
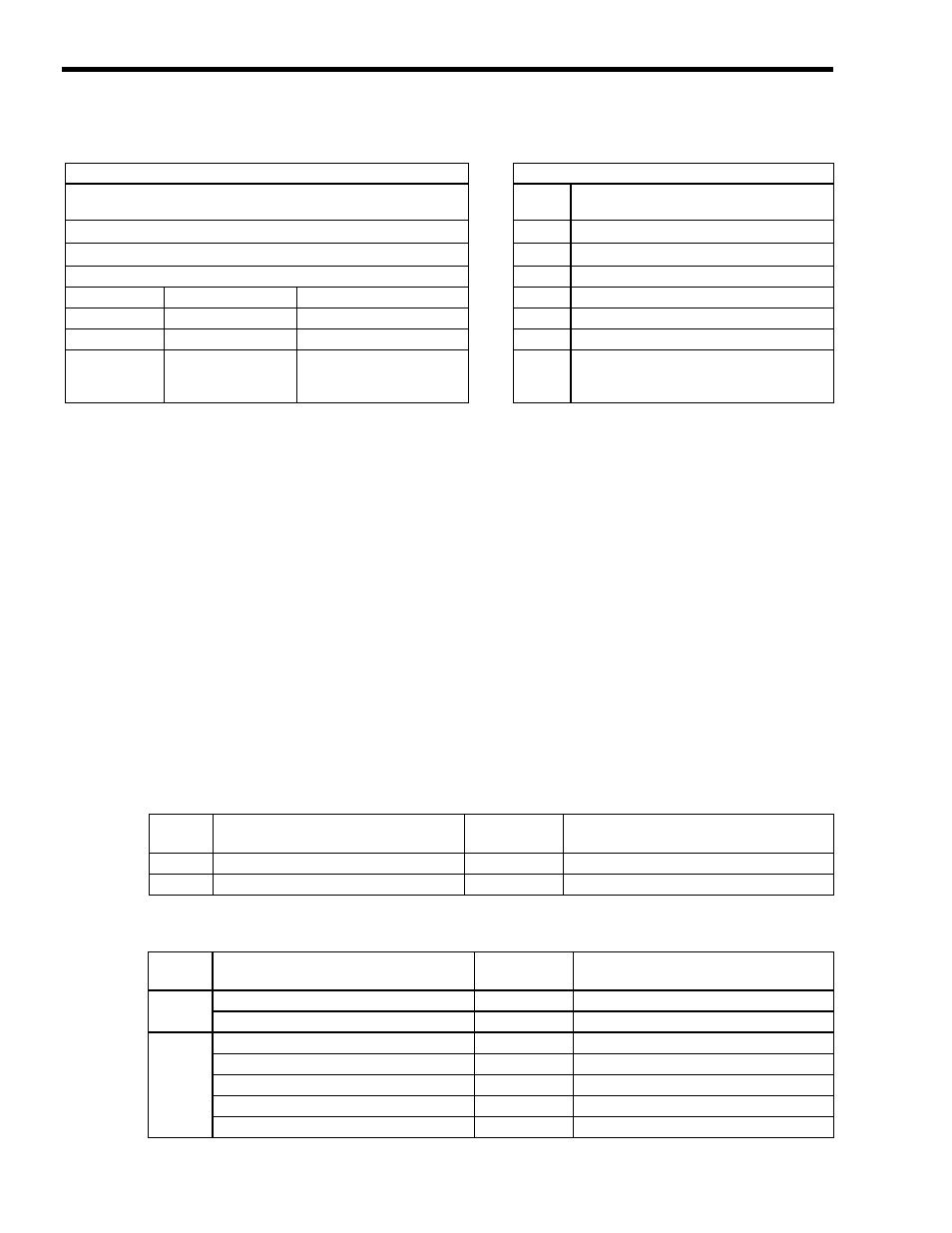
With a Linear Motor Connected
* When converting the unit of Pn282 from
µm to UNIT, multiply by 10
n
and set the results in
fixed parameter No. 6 so that fractions do not result. In the same way for Pn281, multiply by
10
n
and set the results in fixed parameter No. 36.
( 3 ) Restrictions for Feedback Pulse Inputs
[ a ] Restrictions for SERVOPACK Pulse Output Frequency
The limits to the SERVOPACK pulse output frequency are as shown in the following tables.
Upper Limit (Actual Values) of Phase-A/B Divided Output Pulse Frequency for
Σ-II/Σ-III
SERVOPACKs = 1.6384 MHz (before multiplication)
However;
Motor Speed at a Divided Output Pulse Frequency of 1.6384 MHz = 1.6384
× 106 × 60 ÷
Pn212 set value
The following tables show the relationship between the number of encoder bits and the maximum
speed for a pulse frequency of 1.6384 MHz output by Σ-II/Σ -III SERVOPACKs.
Application must be within the ranges shown in these tables when a Σ-II/Σ-III SERVOPACK is
connected to the SVA-01.
•
Σ-II SERVOPACK Connection
•
Σ-III SERVOPACK Connection
SERVOPACK and Motor Specifications
SVA-01 Module Fixed Parameter Settings
Pn282 (Linear scale pitch) [0.01
µm] converted to UNIT.*
→
No. 6
Command Units per Revolution (Rotary
Motor) or Linear Scale Pitch (Linear Motor)
Pn300 (Speed reference input gain)
× 0.01 × 1000
→
No. 23
D/A Output Voltage at 100% Speed
Pn400 (Torque reference input gain)
× 0.1 × 1000
→
No. 24
D/A Output Voltage at 100% Torque
1000 (fixed value)
→
No. 26
A/D Input Voltage at 100% Torque Monitor
Servo type
Σ-II (including Σ-III) 1 (fixed value)
→
No. 28
Servo Drive Selection
Motor type
Linear
1 (fixed value)
→
No. 29
Motor Type Selection
Rated speed
Linear
Rated speed [0.1m/s]
→
No. 34
Rated Speed [0.1 m/s]
Encoder
resolution
Linear
Pn281 (Encoder output
resolution)
÷ 4 [pulses/scaling
pitch] *
→
No. 36
Encoder Resolution (before Multiplication) or
PG Dividing Ratio per Scale Pitch (before
Multiplication)
Encoder
Bits
Pn201 Setting Range
Pn201 Setting
Example
Motor Speed (min
-1
) at a Divided Output Pulse
Frequency of 1.6384 MHz
17 bits
16 to 16384 (in increments of pulses)
16384
6000
20 bits
16 to 16384 (in increments of pulses)
16384
6000
Encoder
Bits
Pn212 Setting Range
Pn212 Setting
Example
Motor Speed (min
-1
) at a Divided Output
Pulse Frequency of 1.6384 MHz
17 bits
16 to 16384 (in increments of pulses)
16384
6000
16386 to 32768 (in increments of pulses)
32768
3000
20 bits
16 to 16384 (in increments of pulses)
16384
6000
16386 to 32768 (in increments of pulses)
32768
3000
32772 to 65536 (in increments of pulses)
65536
1500
65544 to 131072 (in increments of pulses)
131072
750
131088 to 262144 (in increments of pulses)
262144
375