Yaskawa MP2200 Machine Controller User Manual
Page 27
xxvii
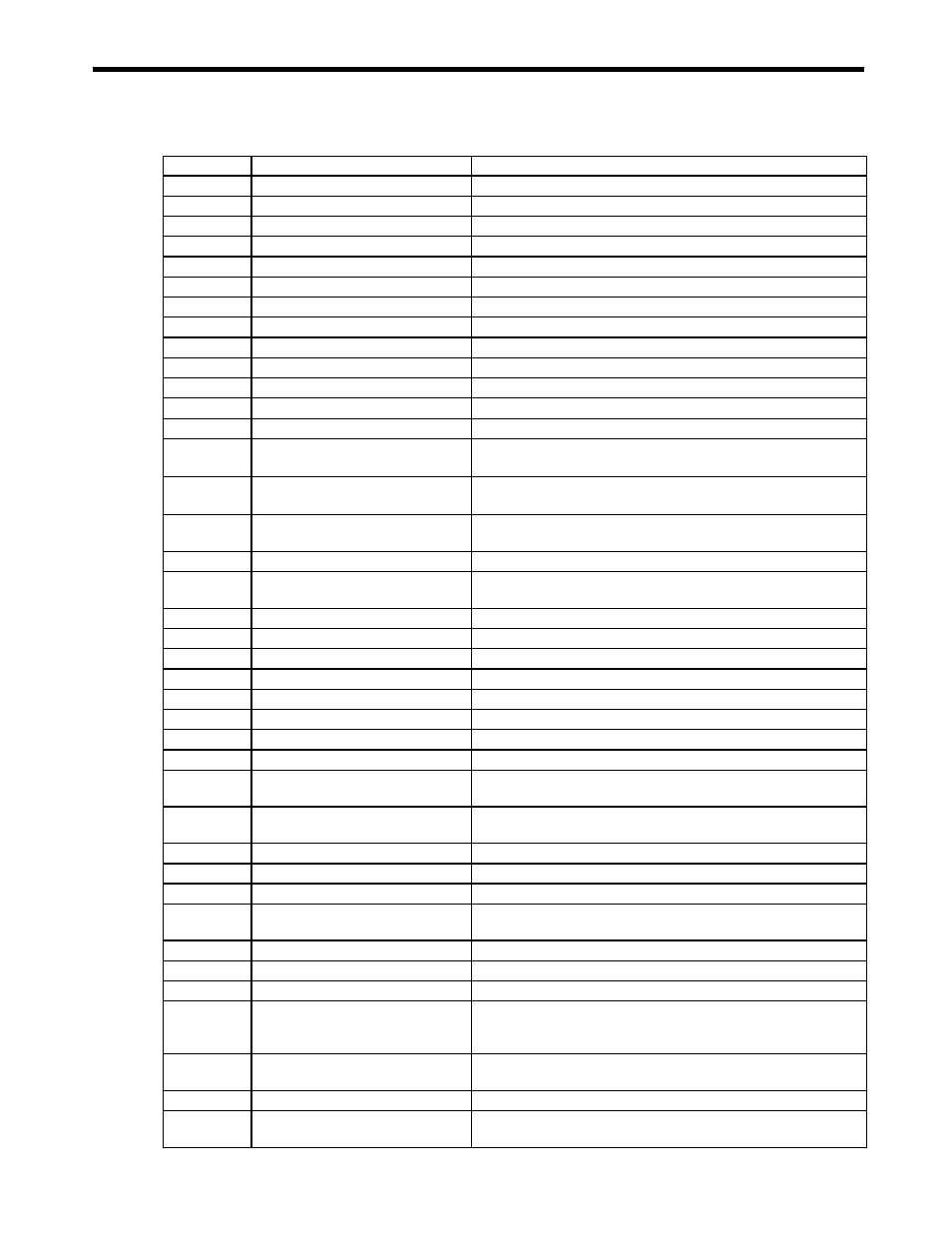
OWxx0E
Torque.SpeedLimit
Maximum speed allowed during torque control
OWxx09
CommandMask
Servo Command options
OBxx090
Command.Pause
Pause command
OBxx091
Command.Abort
Abort command
OBxx092
Command.JogRelativeMoveDirection
Selects Jog or Step direction.
OBxx093
Home.Direction
Selects home direction.
OBxx094
Latch.WindowEnable
Enables the latch zone.
OWxx0A
Command2.SetValue
Additional servopack commands
OLxx0C
Torque.Commanded
The commanded motor torque in % of rated 100=1%
OLxx10
Speed.Commanded
Commanded speed in units based on UnitType
OLxx14
Speed.TorqueLimit
Maximum torque allowed during speed control
OWxx18
Speed.Override
The percentage of commanded speed actually achieved 100=1%
OLxx1C
Position.Commanded
Commanded position, incremental or absolute based on MoveType
OLxx1E
Position.InPositionWindow
Position window that determines when InPosition will be set (when
Actual=Commanded ± Window)
OLxx20
Position.InPosition2Window
Position window that determines when InPosition2
will be set (when Actual=Commanded ± Window2)
OLxx22
Position.ErrorLimit
The value (in user units) that triggers a position error alarm or warning
when exceeded
OLxx28
Position.PhaseCompensation
Position units added to the commanded position in phase control mode.
OWxx26
Position.InPositionTimeOut
The value (in milliseconds) that triggers a position
complete timeout alarm after the profilier is complete
OLxx2A
Latch.WindowLowerLimit
The lower limit of the latch window
OLxx2C
Latch.WindowUpperLimit
The upper limit of the latch window
OWxx2E
Gain.PositionLoop
Increase value for more rigid control.
OWxx2F
Gain.SpeedLoop
Increases value for more rigid dampening.
OWxx30
Gain.PositionFeedForward
Feed Forward adds to the position to increase response
OWxx31
Gain.PhaseFeedForward
Add to the speed in 0.01%
OWxx32
Gain.PositionIntegration
Time in ms used to integrate the position error
OWxx34
Gain.SpeedIntegration
Time in ms used to integrate the speed error
OLxx36
Acceleration
Acceleration Value, units selected by UnitsWord
(OWxx03)
OLxx38
Deceleration
Deceleration value, units selected by UnitsWord
(OWxx03)
OWxx3A
S_CurveTime
Softens acceleration or deceleration.
OWxx3C
Home.Method
The type of homing to perform
OWxx3D
Home.CompleteWindow
The window used to set the home complete bit
OLxx3E
Home.ApproachSpeed
Speed used in the first or second stage of homing
depending on type
OLxx40
Home.CreepSpeed
Speed used to locate the "c" channel or marker pulse
OLxx42
Home.Offset
Offset distance used at the end of homing
OLxx44
Position.Relative
Distance used in the step command
OLxx46
Position.Offset
The offset distance that the motor will travel during the external
positioning command if the external positioning signal is activated
during the move
OLxx48
Home.Define
Redefine the coordinate system. In position mode, the servo will move
when this variable is changed.
OLxx4A
Position.WorkCoordinateOffset
Offset for interpolation commands
OLxx4C
Modulus.SetTurns
Value used to set the number of turns, or times the
position has rolled over the maximum
(cont’d)
Register
Variable Name
Comments