Yaskawa MP2200 Machine Controller User Manual
Page 205
4.4 SVA-01 Module Parameter Details
4-85
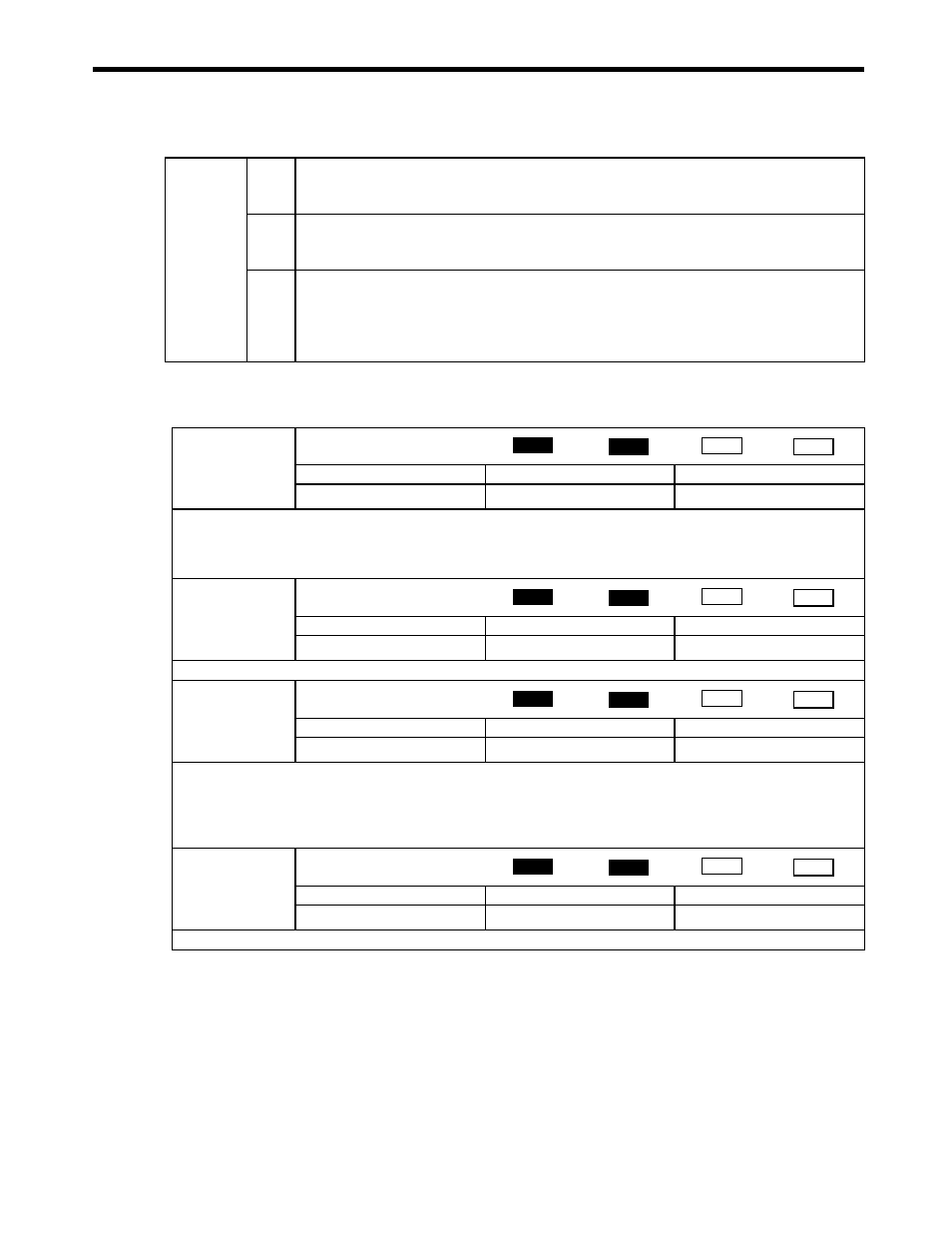
( 32 ) Absolute Infinite Length Axis Position Control Information
OW5D
(cont’d)
Bit 3
General-purpose DO _3
0: OFF (default)
1: ON
Bit 4
General-purpose DO _4
0: OFF (default)
1: ON
Bit 5
General-purpose DO _5
This parameter can be used only in General-purpose I/O Mode.
Used by the system in normal Run Mode.
0: OFF (default)
1: ON
(cont’d)
OL5E
Absolute Position at Power
OFF (Lower 2 words)
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Pulse
0
This is the information for infinite length axis position control when an absolute encoder is used.
The encoder position is stored in 4 words. If the Infinite Length Axis Position Information LOAD bit is set to 1 in the Run
Commands (setting parameter OW00, bit 7), the position information will be recalculated with the values set here and the
Modularized Position at Power OFF (OL62 and OL64).
OL60
Absolute Position at Power
OFF (Upper 2 words)
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Pulse
0
Same as above.
OL62
Modularized Position at Power
OFF (Lower 2 words)
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Pulse
0
This is the information for infinite length axis position control when an absolute encoder is used.
The axis position in pulses (managed internally in the controller) is stored in 4 words.
The encoder position is stored in 4 words. If the Infinite Length Axis Position Information LOAD bit is set to 1 in the Run
Commands (setting parameter OW00, bit 7), the position information will be recalculated with the values set here and the
Absolute Position at Power OFF (OL5E and OL60).
OL64
Modularized Position at Power
OFF (Upper 2 words)
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Pulse
0
Same as above.
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque