11 ) reference monitor – Yaskawa MP2200 Machine Controller User Manual
Page 173
4.3 SVB-01 Module Parameter Details
4-53
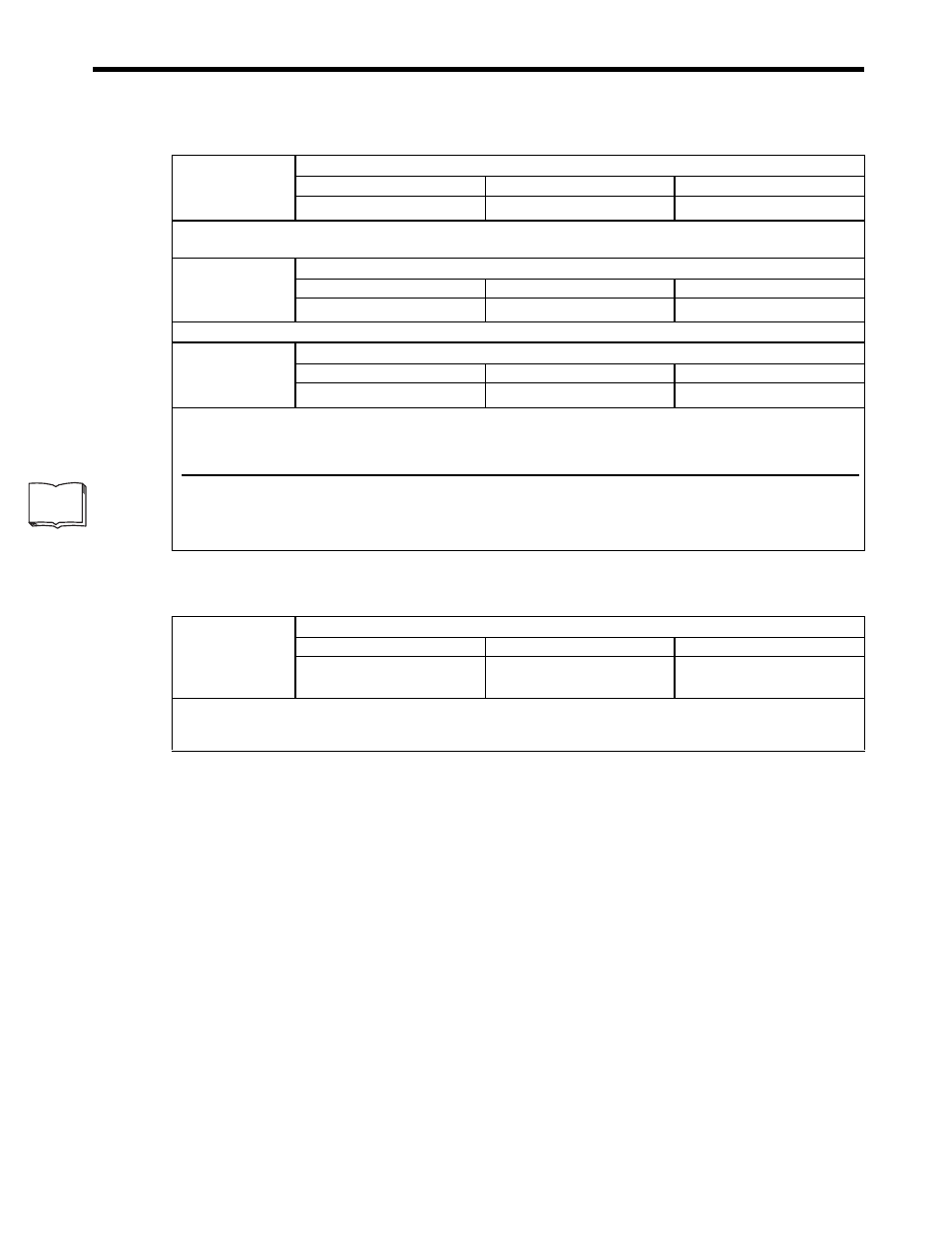
( 11 ) Reference Monitor
IL1A
Position Error (PERR)
Range
Unit
−2
31
to 2
31
−1
Reference unit
Stores the following error (Machine Coordinate System Position (IL12) – Machine Coordinate Feedback Position
(IL16)) managed by the Motion Module.
IL1C
Target Position Difference Monitor
Range
Unit
−2
31
to 2
31
−1
Reference unit
Stores the number of pulses distributed each scan.
IW1E
POSMAX Number of Turns
Range
Unit
−2
31
to 2
31
−1
rev
This parameter is valid for an infinite length axis.
The count stored in this parameter goes up and down every time the current position exceeds the Maximum Value of Rotary
Counter (POSMAX) (fixed parameter 10).
1
Machine Coordinate System
The basic coordinate system that is set according to Zero Point Return (ZRET) command execution or Zero Point Setting
(ZSET) command execution. The MP2200/MP2300 manages the positions using this machine coordinate system.
(cont’d)
TERMS
IL20
Speed Reference Output Monitor
Range
Unit
−32768 to 32767
(
−2
31
to 2
31
−1)
pulse/s
Stores the speed reference that is being output.
This parameter monitors the speed being output to the MECHATROLINK. This parameter will be 0 for interpolation or phase
control.