Yaskawa MP2200 Machine Controller User Manual
Page 198
4 Motion Parameters
4.4.2 Motion Setting Parameter Details
4-78
( 19 ) Position Compensation
( 20 ) Position Complete Timeout
( 21 ) Phase Compensation
OL24
Position Compensation
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference unit
0
Set the value used for position compensation.
Position
Phase
Speed
Torque
OW26
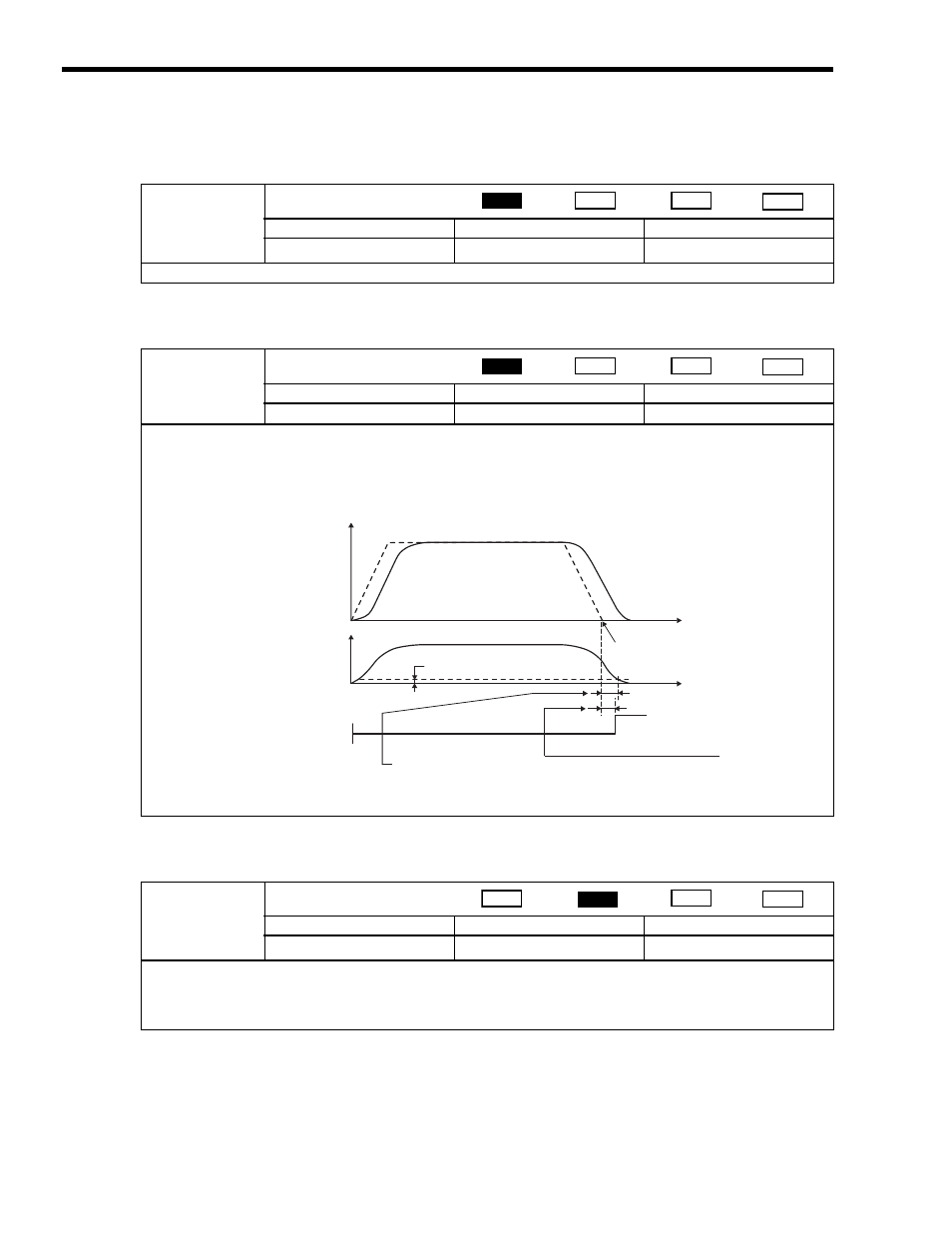
Position Complete Timeout
Setting Range
Setting Unit
Default Value
0 to 65535
ms
0
Set the time to detect a positioning time over error.
If the Positioning Completed bit does not turn ON within the time set here after reference pulses have been distributed during
position control, a Positioning Time Over alarm (monitoring parameter IB046) will occur. The completion of positioning
will not be checked if this parameter is set to 0.
Position
Phase
Speed
Torque
Speed
Following
Error
Position Completed Width
When this time is longer than the
Position Complete Timeout, a
Positioning Time Over alarm will occur.
Distribution
Completed
Positioning
Time Over
Position Complete Timeout
OL28
Phase Compensation
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference unit
0
Set the phase compensation in reference units for phase reference commands.
Use this parameter to compensate for reference pulses in control systems without rigidity, in which higher gain cannot be
applied.
Refer to 5.2.24 Phase References (PHASE) for details on phase reference commands.
Position
Phase
Speed
Torque