Yaskawa MP2200 Machine Controller User Manual
Page 194
4 Motion Parameters
4.4.2 Motion Setting Parameter Details
4-74
( 10 ) Speed Reference
( 11 ) Torque Limit Setting at Speed Reference
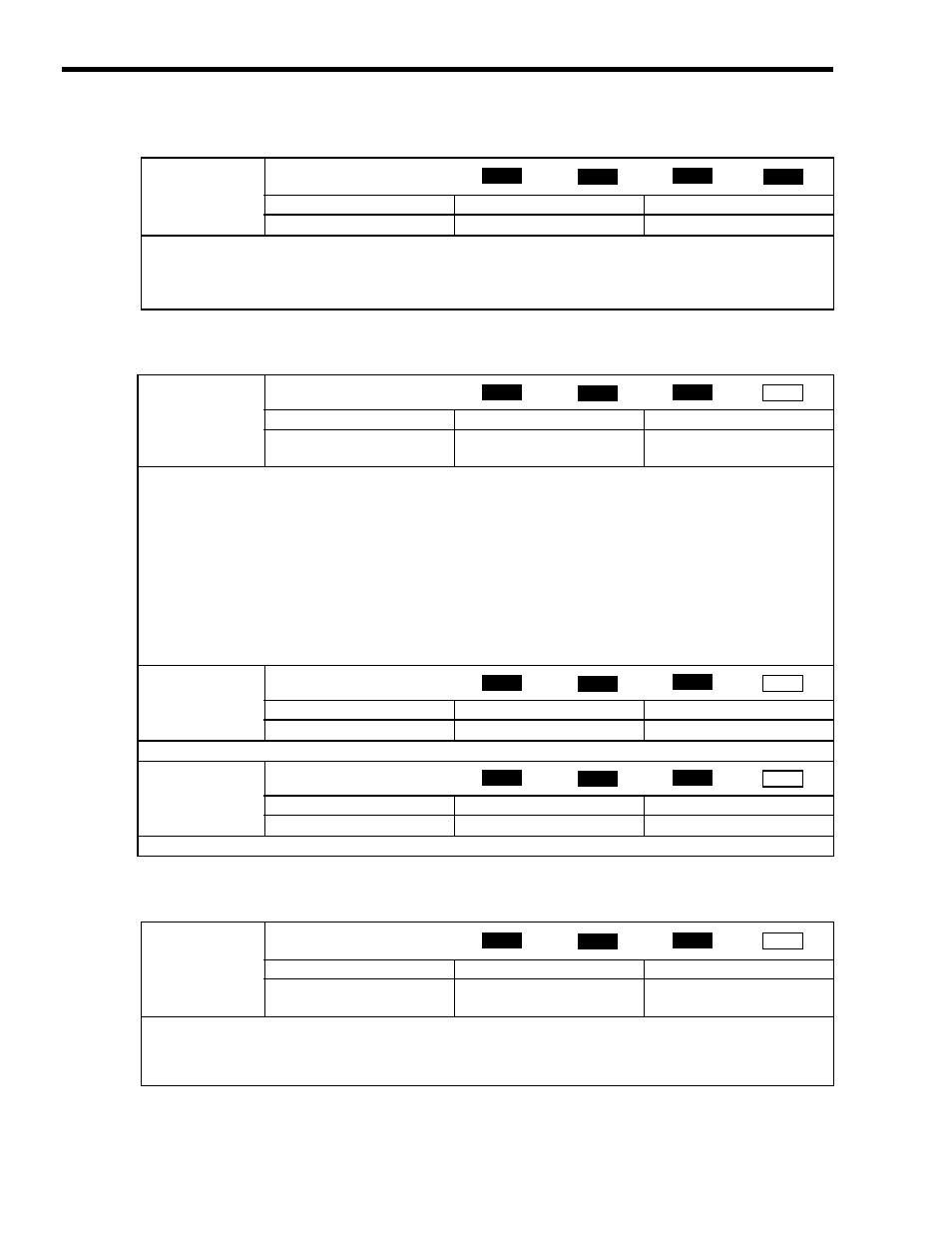
OW0F
Torque Reference Primary
Lag Filter
Setting Range
Setting Unit
Default Value
0 to 32767
ms
0
A primary lag filter can be applied to the torque reference and torque limit.
The Torque Reference Primary Lag Filter is cleared to 0 in the following cases.
• The filter is cleared to 0 when the command is switched from another motion command to a TRQ command.
• The filter is cleared to 0 when the command is switched from a TRQ command to another motion command.
(cont’d)
Position
Phase
Speed
Torque
OL10
Speed Reference
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Speed Units (setting parameter
OW03, bits 0 to 3)
3000
Set the speed reference.
This parameter is used for the following commands.
1: POSING
Positioning
2: EX_POSING
External Positioning
3: ZRET
Zero Point Return
7: FEED
JOG Operation
8: STEP
STEP Operation
23: VELO
Speed Reference
25: PHASE
Phase Reference
Refer to Chapter 5 Motion Commands for details.
OL12
Forward Speed Limit
Setting Range
Setting Unit
Default Value
0 to 32767
0.01%
15000
Specify the maximum forward speed as a percentage of the rated speed.
OL13
Reverse Speed Limit
Setting Range
Setting Unit
Default Value
0 to 32767
0.01%
15000
Specify the maximum reverse speed as a percentage of the rated speed.
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
OL14
Positive Side Limiting Torque
Setting at Speed Reference
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Torque Units (setting parameter
OW03, bits C to F)
30000
Set the torque limit for the speed reference command.
The same value is used for both the forward and reverse directions.
Use this parameter when a torque limit is required at certain times while the machine is operating. For example, use this
parameter to hold a workpiece or press an object to stop it.
Position
Phase
Speed
Torque