12 ) servo driver settings – Yaskawa MP2200 Machine Controller User Manual
Page 186
4 Motion Parameters
4.4.1 Motion Fixed Parameter Details
4-66
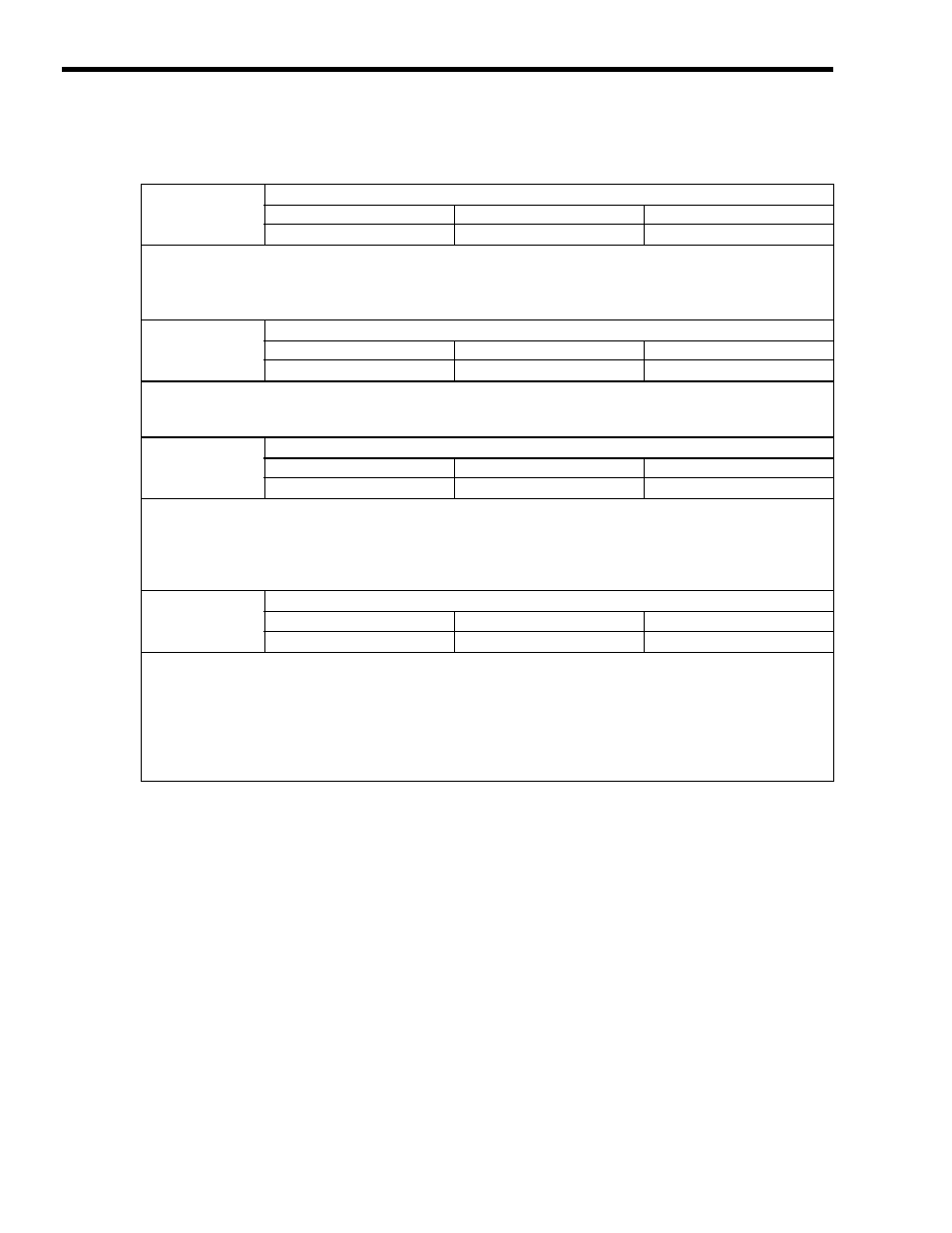
( 12 ) Servo Driver Settings
* With the SGDA and SGDB: Cn-02.Bit 0 = 1 (Reverse rotation mode)
With the SGDM, SGDH, and SGDS: Pn000.0 = 1 (Reverse rotation mode)
No. 28
Servo Driver Series
Setting Range
Setting Unit
Default Value
0 to 2
−
1
Select the series of the Servo Driver being used.
0:
Σ
1:
Σ-II or Σ-III (default)
2: Reserved
No. 29
Motor Type
Setting Range
Setting Unit
Default Value
0 or 1
−
0
Set whether a rotary or linear motor is being used.
0: Rotary motor (default)
1: Linear motor
No. 30
Encoder Type
Setting Range
Setting Unit
Default Value
0 to 3
−
0
Set the type of encoder that is being used.
0: Incremental encoder
1: Absolute encoder (default)
2: Absolute encoder used as an incremental encoder.
3: Reserved
No. 31
Rotational Direction of Absolute Encoder
Setting Range
Setting Unit
Default Value
0 or 1
−
0
Select the rotational direction when using an absolute encoder.
0: Forward (default)
1: Reverse
(
Note) Specify reverse operation (a setting of 1) in the following cases.
A SERVOPACK compatible with absolute encoders is being used and a “reverse rotation
connection” is selected in the SERVOPACK’s parameters*.
For details, refer to 9.2.2 Overtravel Input Signal Connections.