8 ) motion subcommand ( 9 ) torque reference – Yaskawa MP2200 Machine Controller User Manual
Page 193
4.4 SVA-01 Module Parameter Details
4-73
( 8 ) Motion Subcommand
( 9 ) Torque Reference
OW0A
Motion Subcommand
Setting Range
Setting Unit
Default Value
0 to 5
−
0
Set the motion subcommands that can be used with the motion command.
The Fixed Parameter Monitor function is the only valid motion subcommand.
0: NOP (No command)
1 to 4: Reserved (Reserved for the system)
5: FIXPRM_RD (Read Fixed Parameters)
Position
Phase
Speed
Torque
OL0C
Torque Reference
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Torque Units (setting parameter
OW03, bits C to F)
0
Set the torque reference for torque reference commands. Refer to 5.2.23 Torque Reference (TRQ) for details.
OW0E
Speed Limit during Torque
Reference
Setting Range
Setting Unit
Default Value
−32768 to 32767
0.01%
15000
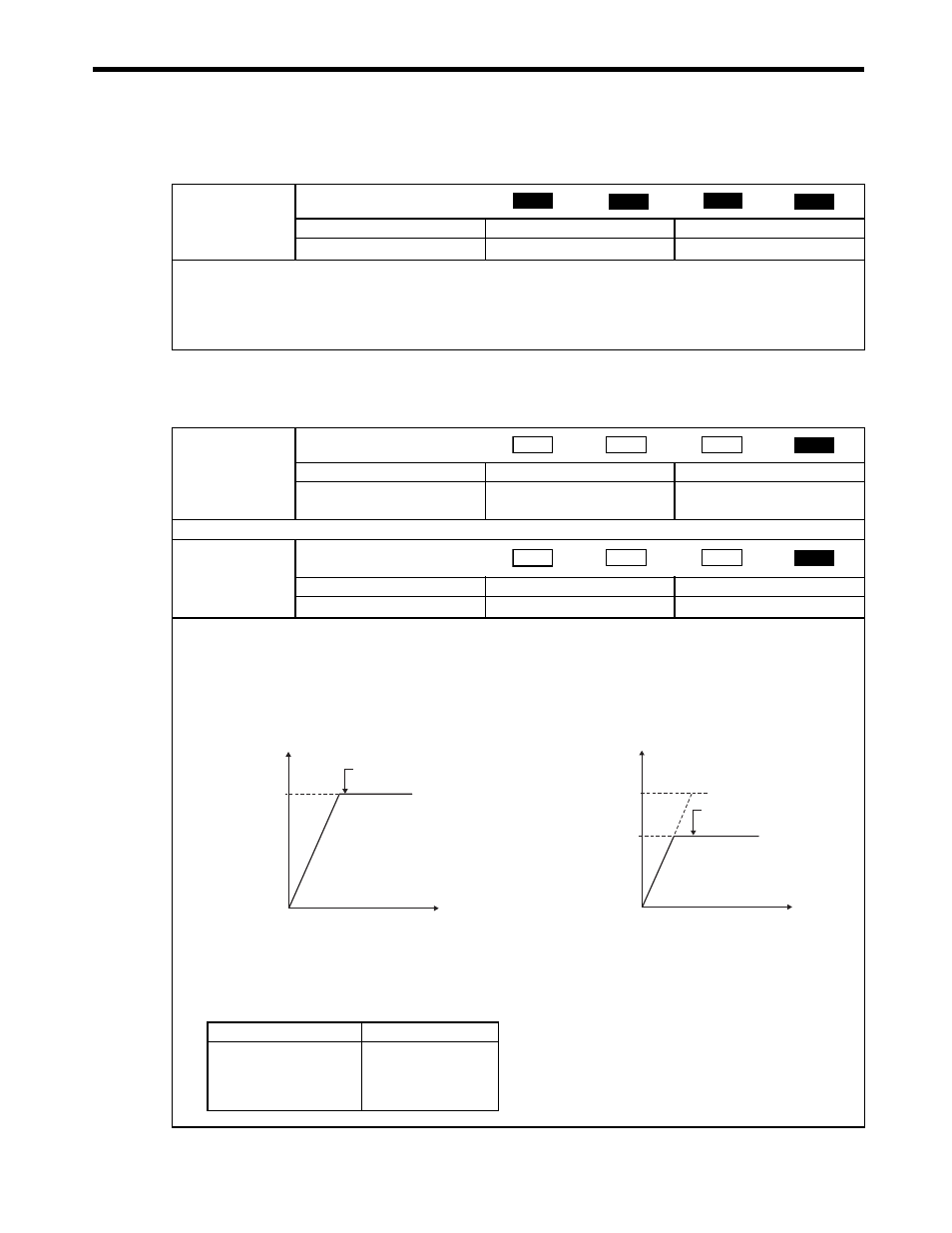
Set the speed limit for torque reference commands as a percentage of the rated speed.
Torque control is used to control the Servomotor to output the specified torque, so it does not control the motor speed.
Therefore, when an excessive reference torque is set relative to the load torque of the machine, the machine's torque will be
overpowered by the torque reference and the motor speed greatly increases.
The torque reference speed limit functions to limit the Servomotor speed during torque control to protect the machine.
No speed limit
Speed limit used
Either the Torque Reference Speed Limit setting (OW0E) or the SERVOPACK's torque control speed limit (Pn407),
whichever is lower, will be used as the speed limit.
■
Related Parameters
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
0
t
Speed
A high acceleration rate
may damage the machine.
Maximum speed
0
t
Speed
Speed limit
The speed limit
prevents damage.
Maximum speed
SGDH, SGDM, SGDS
SGDA, SGDB
Pn002.1
Pn407
Pn408.1
Pn300
Cn-02, bit 2
Cn-14
−
Cn-03