10 change linear deceleration time constant (dcc), 10 cha, 1 ) operating procedure ( 2 ) holding and aborting – Yaskawa MP2200 Machine Controller User Manual
Page 306
5 Motion Commands
5.2.10 Change Linear Deceleration Time Constant (DCC)
5-76
5.2.10 Change Linear Deceleration Time Constant (DCC)
The DCC command transfers the setting of the Linear Deceleration Time (motion setting parameter
OL38) to the Second-step Linear Deceleration Time Constant in the SERVOPACK and enables
the setting.
For the SGD-N and SGDB-AN SERVOPACKs, this command is ignored.
( 1 ) Operating Procedure
( 2 ) Holding and Aborting
The Command Pause bit (OB090) and the Command Abort bit (OB091) cannot be used.
No.
Execution Conditions
Confirmation Method
1
There are no alarms.
Both IL02 and IL04 are 0.
2
The Servo ON condition.
IB001 is ON.
3
Pulse distribution has been completed for the
SERVOPACK.
IB0C0 is ON.
4
Motion command execution has been completed.
IW08 is 0 and IB090 is OFF.
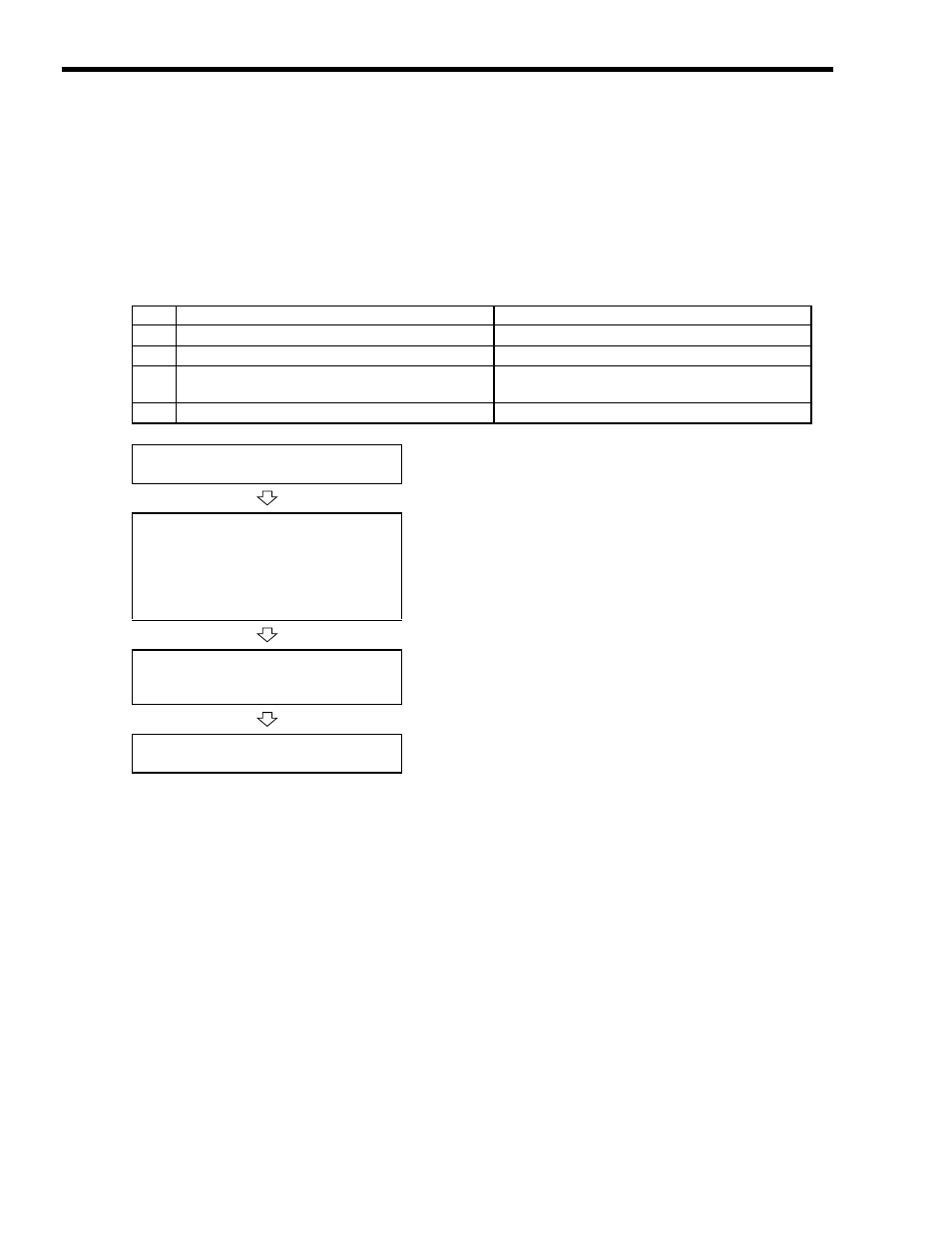
Execute the DCC motion command.
• Set OW08 to 11.
• With the MECHATROLINK-II, there is the function that the change of
setting parameter is automatically updated. If utilizing this function,
there is no need to execute DCC command. For details, refer to bit A
(User Constants Self-writing Function) in Fixed Parameter 1 (Function
Selection 1).
• The Command Pause (OB090) cannot be used.
• The Command Abort (OB091) cannot be used.
The Linear Deceleration Time Constant is set in
the SERVOPACK and enabled.
• IW08 will be 11 during command
execution.
• IB090 will be ON during command
execution.
Parameter change completed.
• IW08 will be 11 and IB090 will be
OFF.
Execute NOP motion command.
• Set OW08 to 0.